The Planetary Report - Archive 1996
Matthew P. Golombek : 01 - 02 1996
火星探査の新たな道を開くマーズ・パスファインダー
NASAの惑星探査の方針が変わる。重厚長大の探査機によるミッションに替わり、「より速く、より良く、より安く」を前提とする新しい探査の途が開かれた。マーズ・パスファインダーはその先駆者である。[ 1996年01月/02月 ]
Matthew P. Golombek
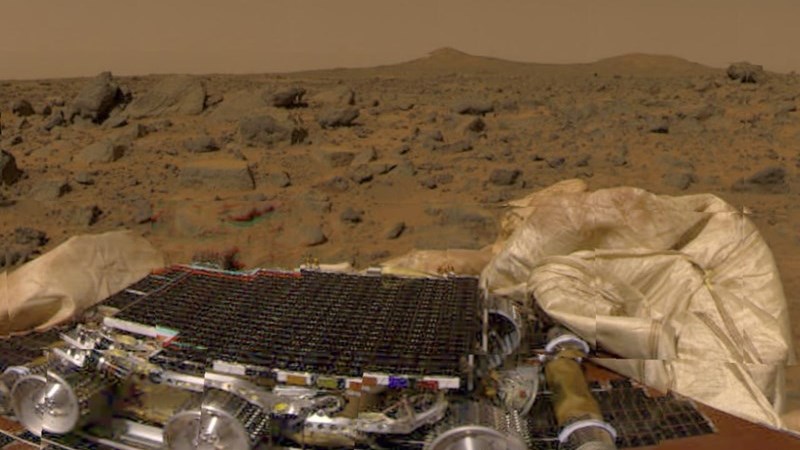
Image Caption :
着陸したパスファインダーのランダー。 パネルに取り付けられていたミニ・ローバーが姿を現わし、火星の地面に降りて探査を始める。
Image Credit : NASA
探査機バイキングの軟着陸(1976年7月および9月)以来、20年振りにマーズ・パスファインダーが火星に向かう。1996年12月2日、この小型の探査機は打ち上げられ、1997年7月4日に火星に着陸して太陽系で地球に最も似ている赤い惑星の探査を再開する予定である。
この火星ミッションは、今後2年半毎に訪れる打上げ窓(地球と火星の位置関係から火星に比較的速く到着できる時期)に打上げられる新しい一連のミッションの「さきがけ」となるよう、パスファインダー(先駆者)と命名された。「より速く、より良く、より安く」をモットーとするディスカバリー計画のもとで進められるこのミッションは、NASAにとっては太陽系探査の新たな門出となる。
パスファインダーは比較的小さい探査機で、満タンの燃料を入れても、総重量はわずか 850kg である。搭載されるランダー(着陸機)の重量は約 300kg で、バイキングの半分以下である。この他ペイロード(科学機器)、ローバー(ロボットの探査車)及び 25kg のサブシステムが含まれる。
新しい飛翔方法
マーズ・パスファインダーは、火星着陸に新しい方法を試みる。パラシュートが減速すると、エアーバッグの複合体が膨らみ、探査機が地表に着地するときの衝撃を和らげる。パスファインダーが着地すると、エアーバッグは縮み、花びらの形をした太陽電池パネルが開いて搭載された機器が展開される。
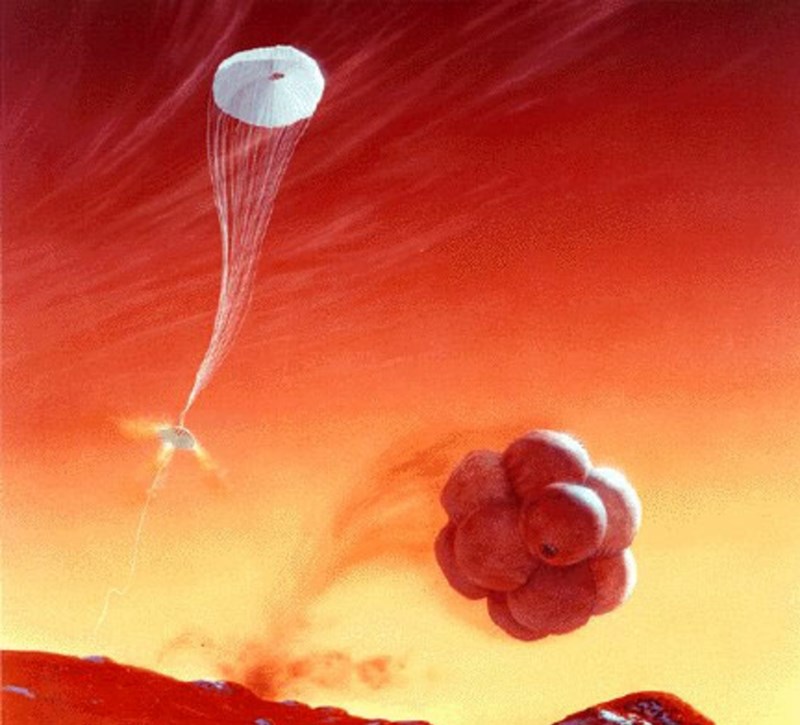
Image Caption :
Image Credit : NASA
エアーバッグは、このミッションで最も斬新なアイデアであろう。 火星に硬着陸する際の衝撃を吸収するために考案されたものである。ランダーが着陸すると、エアバッグはしぼみ、三角形の花びらの形をしたパネルが開き、パネルの内側の太陽電池パネルが現われ、そしてランダーが姿を現す。続いてソジャーナー(Sojourner)という名前のミニローバーが中から出てくる。
ランダーには、3Dカメラ、アルファ・プロトンX線分光計と火星大気の組成や気象を測定する科学機器が搭載されている。ランダーは少なくとも30火星日(7.2火星日は地球の7日に相当する)は生き抜くはずであり、場合によっては1年間生き長らえる可能性がある。ミニローバーは数ヵ月間、その周囲を探査することができるかもしれない。
重量 10kg、サイズは長 65cm、幅 32cm、高さ 48cm のミニローバーは、太陽電池で作動する小型の6輪車である。このミニローバーは、常にランダーに搭載されたカメラの視野の範囲で活動するので、ランダーから数 10m 以上離れることはない。
データの収集
ミニローバーの主目的は、今後の惑星探査におけるローバーの性能改良のためのデータを得る工学実験である。科学調査によりデータが得られるとすれば、それはボーナスと考えるべきであろう。ミニローバーの前部には、走行路の危険な箇所を探しだしたり、火星地表の画像を地球に送る白黒の立体カメラが取り付けられれている。また後部には、カラー画像を撮影できるカメラ、ミニローバーが接触する物体の組成を測定できるアルファ・プロトンX線分光計(APXS)が取り付けられている。
APXS はミニローバー車体の後方に取り付けられていて、そのセンサーを岩石や土壌、ローバーの車輪が掘った窪みや削り取った岩石に向ける仕組みになっている。後部のカメラは、APXS が測定する場所を差しわたし 1mm までの分解能で撮影する。
ランダーには、IMP(Imager for Mars Pathfinder)と呼ばれる極めて精度の高いカメラを取り付けられている。IMPは近赤外線に反応して視認する24種類の分光フィルターが付いた立体装置で、ビックリ箱の飛び出し棒のような支柱の上に取り付けられている。この装置はローバーのカメラと連動して火星の地質過程や、地表と大気の相互関係をセンチからメートルのレベルでで測定する。
IMP とローバーのカメラは火星表面の岩石の分布、地表の傾斜、そして火星表面を形成した地質過程解明するデータが得られるよう包括的な探査を行なう。パスファインダー・ミッションは1年間続くように設定されているので、火星表面の変化を何度も分析できるようになっている。霜、塵、砂による浸食、あるいは地表と大気の相互関係などにより、ランダー周囲の景色は変わりうるからである。
ローバーの車輪は、地表を調べるための道具として使われる。車輪で作られた轍の画像を分析することにより、土壌の組成について更に詳しく知ることができる。車輪で浅い窪みを掘り、地表の真下に何があるのか明らかにすることができる。更に、ランダーの着陸で作られた窪みの画像は貴重なデータになるかもしれない。
APXS と近赤外線で視認する IMP のフィルターを連動させることにより、岩石やその他の地表物質の組成や含有鉱物の特定することができる。このようにして得られた情報は、火星の地殻の組成、風化作用でできた物質の相違やその形成の過程を解く鍵となる可能性がある。
ランダーの周りに取り付けられた五台の磁性測定用器で得られる IMP マルチスペクトル画像で、空気で運ばれて堆積した塵の磁性を識別する。バイキングのランダーに搭載された磁性測定器は塵で飽和状態になり、多くの科学者を驚かせた。火星の塵が多量の磁気物質を含んでいることを示唆したからである。 IMP と APXS を併用して調べることにより、塵の組成と生成の原因がわかる。
大気の調査
晩夏に当たる火星の北部地域の日の出直前にランダーが大気に突入して降下する間、大気組成測定器は、大気の高度ごとの気圧、温度および密度を測定して、地球にデータを送ってくる。パスファインダーの測定データは、20年前のバイキング・ランダーが得た同じデータを補完する。また、数ヵ月後に空気制動を使って火星大気に突入する予定のマーズ・グローバル・サーベイヤーの貴重な情報を与えることになる。
ランダーの気象観測装置とIMPは、毎日大気の気圧、温度、不透明度および風速と方向を測定する。温度を測定する三つの熱電対は、高熱を発するランダーの電子機器から離されて、太陽電池パネルに立てられた高さ約 1m のマストの上に取り付けられている。このマストの先端に取り付けられた風センサーが、風速と風の方向を測定する。空と太陽スペクトルを定期的に観測するランダーのカメラが、水蒸気の存在量とともに塵粒子のサイズ、形、垂直分布をモニターする。
パスファインダーの着陸地点は、着陸の安全性と科学調査上の両面から慎重に選ばれた。選ばれたのは、火星の基準面より高さが 2km 低い、北緯 19.5 度、西経 32.8 度に位置するアレス谷だった。この谷には破壊的な洪水がクリュセ平原(バイキング1号の着陸地点から約 800km 離れている)に流れ込んだと思われる流床が見られる。
このアレス谷は、太古のクレーターで覆われた地面をはじめとする様々な地殻物質、比較的若くうねった平原の物質、そして洪水による堆積物で再生された流床の物質など、多種多様のサンプルの「宝探しの場所」と想定されている。これ等の物質の正確な出所はわからないが、後の軌道上からの探査で得られるデータと合わせて、正確な出処を推定することは可能であろう。バイキング・オービターの画像によると、近くの流線状の島型地形、小さい丘陵地形や小規模の二次クレーターを除けば、火星の表面は滑らかのようである。
パスファインダーは、このアレス谷から我々の火星に対する理解を深めるだけでなく、未来の火星探査計画の指標となる様々な発見をするだろう。バイキング・ミッションはおそらく今までで最も野心的な惑星探査であり、その科学的成果は莫大なものである。しかし、このような大規模でコストのかさむ惑星探査の時代は過ぎ去った。今は、より小規模のコストの低い方法を見出さなければならない時代である。この意味で、パスファインダーは惑星探査の新しい方向を示す第一歩であり、惑星探査の科学と技術の面の真に明るい未来へつながる。

Akira IMOTO
Editorial Chief, Executive Director and Board of Director for The Planetary Society of Japan