次世代太陽系探査
はやぶさ2からポストはやぶさ2へ : February 01, 2023. Updated.
はやぶさ2ミッションを振り返って
はやぶさ2ミッションを振り返って
火の鳥「はやぶさ」未来編 その 27
原文 - 日本惑星科学会誌「遊・星・人」第31巻(2022)3号 - PDF
佐伯 孝尚
宇宙航空研究開発機構宇宙科学研究所
この遊星人記事は、日本惑星科学会遊星人編集専門委員会より許可を得て掲載しております。また、お読み頂いたあとは感想等をお送り頂くと、主著者・編集者共に非常に喜びます。下段のフォームから。
(要旨)はやぶさ2は,2019年02月22日と07月11日の2回リュウグウの試料を採取し,それを2020年12月06日に地球へ届けることに成功した.その後,リュウグウの試料の分析が着々と進み,科学成果が次々と発表されていく中,はやぶさ2プロジェクトチームは2022年06月末にて解散となった.2011年のプロジェクト化からでも,10 年以上という長期間の活動となったはやぶさ2について,プロジェクトチームの一員として名を連ねていた筆者の視点で振り返り,過去を懐かしむとともに,長い活動の中で得られた教訓等についてまとめる.
1. はじめに
2020年12月05日,私は宇宙科学研究所のセキュリティエリアの中にある管制室内にいた.リュウグウの試料の入った大事なサンプルリターンカプセルを分離するための運用の最中である.やり直しができない運用であることもあり,管制室内も緊張感が漂っていた.困難なプロジェクト立ち上げ,厳しいスケジュールの中での開発を経て打ち上げられたはやぶさ2の集大成の運用である.打ち上げ後も,往路巡行/小惑星到着フェーズ,小惑星近傍フェーズ,復路巡行/精密誘導フェーズと,数多くの苦しい場面をチームメンバ皆で繋いできた「襷」をカプセルチームとその後の回収チームに渡す時がついにやってきたのだ.
私は2018-2019年の小惑星近傍運用フェーズの大変な時期を思い出しながら,「ここまで来て分離しないってことないですよねぇ.分離してからもちゃんと飛びますよねぇ(ニヤニヤ)」とカプセルチームに話しかける.襷とともに蓄積された積年のプレッシャーも忘れずに渡すためだ.担当の一人は,「(必ず最後の最後で最大のプレッシャーを受ける)カプセル二度とやらねぇ」と言いつつも,この日のために(開発も含め) 準備はしっかりとやってきているぞ,という自信に溢れた顔をしていた.私もそんなカプセルチームを信頼し,運用の成功を確信していた.
「3,2,1,0 分離」日本時間 14:30 カプセル分離コマンドが実行された.分離はすぐに確認された.皆がホッとする中,私は続く探査機の地球再離脱に向けた指示を出した.はやぶさ初号機では,エンジンの故障のため出来なかった運用である.はやぶさ2は 15:30 から 3 回に分け,合計 12 m/s の速度変更を行い,地球をスイングバイして再離脱する軌道に入った.はやぶさ2の拡張ミッションに襷を繋ぐことができたのだ.ここで私は一息ついて 10 年前を思い出していた.
2010年06月13日,はやぶさ初号機は,満身創痍ながら地球まで約 7 万 km の距離でカプセルの切り離しを行い,最後の地球撮像を終え,地球の大気圏に突入した.当時私は IKAROS という探査機の運用の最中であったが,はやぶさの運用の様子が気になって見ていたのだ.学生時代の恩師でもある,はやぶさプロジェクトマネージャ川口氏とチームの皆のやり遂げた表情は,なんとも清々しく格好良かったことか.こういう仕事をいつかしてみたいと思っていたが,まさか 10 年後に自分が管制室ではやぶさ2の帰還に立ち会えるとは当時は想像もしていなかった.このように思い返すと,襷は,はやぶさ2のずっと前から繋がれてきたのだと実感した.
カプセルの地球帰還から一年半の2022年06月末で,はやぶさ2プロジェクトチームは解散になった.予想を超える 5.4 g ものリュウグウのサンプルの分析は,今後も世界中で行われ,我々に次々と新しい発見をもたらしてくれるだろう.私は,10 年以上の期間にわたって,はやぶさ2に微力ながら尽力させていただいたこともあり,成功裡にプロジェクトが終わったことにホッとしつつ,ある種の喪失感を感じている.今回ご縁があってこのような執筆の機会をいただいたこともあり,はやぶさ2プロジェクトについて振り返りをさせていただこうと思う.自分語りの拙い文章であるが,ご容赦いただきたい.
2. はやぶさ2プロジェクト化と開発フェーズ
2-1. はやぶさ2のプロジェクト化
私は,宇宙科学研究所で修士・博士課程を過ごし,ポスドクとメーカ勤務を経て,2009年07月に,宇宙科学研究所に赴任した.新天地での活動に夢を膨らませているところに,当時の上司でもあり恩師でもあった川口氏に「佐伯くん,いま暇だよね.はやぶさ2やらない?」と言われた.疑問形であってもこれは強制である.こうして,私のはやぶさ2への参加が光の速さで決まったのである.当時,吉川氏を中心に,はやぶさ2は立ち上げに向けての準備を行なっているところであったが,状況はあまり良いものではなかった [1].はやぶさ初号機と違いを出すために検討されていた,探査機を小惑星にぶつけるという独立インパクタという構想は,コストが問題視されており,低コストで小惑星の地下にアクセスする手法について検討をしているところであった.私はその担当になった.私は当時三十二歳で,本格的な探査ミッションに携わるのは初めてであった.右も左も分からない中,メーカ含めたミーティングを何度も行なって,爆薬を使用して衝突体を高速射出する小型インパクタという方法に辿り着いた.2009年10月には,後のパートナーとなる日本工機の白河製造所において超小型供試体を用いた衝突体の飛翔実験を行ない,実現に向けて手応えを得た.その後も細々と検討を進めている中,2010年06月13日のはやぶさの地球帰還が大きな注目を集めることになり,はやぶさ2のプロジェクト化の動きが急加速し,2011年05月に正式なプロジェクトとなった.
2-2. 衝突装置の開発
私は正式に,新規機器となる衝突装置(Small Carry-on Impactor: SCI)の開発責任者となり,開発体制を整えていった.JAXA 側は私を開発責任者とし,メーカ側の体制としては,IHI エアロスペース,NEC,日本工機の 3 社の体制となった.ありがたいことに,私が未熟なことを考慮してか,メーカのメンバは所謂プロであり,経験豊かな方々で構成されていた.経験の浅い私は,おかしなことも多々言ったと思うが,粘り強く丁寧に議論していただいた.逆に私は,自身の専門外の設計について,その「こころ」を学ぶように心がけ,少しでもついていこうとした.今思えば,開発責任者にしていただいたことで,自身の判断が物事を左右するという実践の場を与えてもらい,その中で百戦錬磨のメーカの方々に鍛えてもらったのだと思う.困ったことがあって色々な専門家に相談した時も,丁寧に教えてもらった.このように,実際の現場における On the Job Training によって私自身が成長し,技術についても多少なりとも引き継ぐことができたと思う.
衝突装置の開発自体は,楽しくもあり非常に苦しくもあった.とにかくスピード重視で,システムを簡易なものにするように設計したのだが,新機開発器であることもあり,スケジュールが厳しかった.自分達のせいで打ち上げを遅らせるわけにはいかないと必死であった.おそらく探査機開発に携わった全ての方々が同様の気持ちであっただろう.誰が最初にギブアップを言い出すのかという,さながらチキンレースのような開発であったと思う.
困難な開発であったが,チームの雰囲気は非常によかったと思う.私とコンビを組んでくれた今村氏を筆頭に,明るい人が多く,また妥協を許さないメンバばかりであったので,トラブルが起こっても悲観的にならず解決策を考え,一歩一歩着実に開発を進めていった.非常に苦労した分離試験を含む種々の開発試験をクリアしていき,2013年秋にはフライト品と同等な供試体を用いた衝突体の飛翔試験を岐阜県で実施し,設計通りの性能が出ていることを確認した(図 1).ちなみに,この試験の時に作られたクレータは心配になるくらい小さく,これが2019年の本番まで私の頭から離れず,私のメンタルを削り続けるのであった(図 2).ともあれ,チームメンバの必死の努力により,何とか衝突装置を種子島に送るところまでこぎつけた.

Image Caption :
図 1:2013年秋の衝突体飛翔試験完了時の集合写真.
画像クレジット: JAXA/JSPS

Image Caption :
図 2:衝突体飛翔試験で生成された直径 2 m 程の浅いクレータ.
画像クレジット: JAXA/JSPS
3. はやぶさ2の打ち上げ
3-1. フライトオペレーション
2014年の09月から種子島で打ち上げに向けた最終工程(フライトオペレーション)が始まった.衝突装置は,探査機本体より先に種子島に到着し,09月半ばから最終の整備を開始した.ここまでくれば順調にいくだろうと思っていたが,09月某日の私の三十八歳の誕生日は祝われることなく,種子島宇宙センターでの作業と打ち合わせで消えていった.それでも,何とか09月27日に最終整備を完了した(図 3).

Image Caption :
図 3:衝突装置最終整備完了時の集合写真.
画像クレジット: JAXA/JSPS
探査機の方の作業も着実に行われ,衝突装置は探査機に組み付けられ,10月末には大量の爆薬を持つ爆薬部が探査機に取り付けられた.気の弱い私は,以降,はやぶさ2が打ち上がるまでハラハラしていたことは言うまでもない.11月11日に打上前最終確認会が実施され,その後ロケットに引き渡された.
本稿は筆者の視点から,衝突装置の開発にフォーカスしているが,はやぶさ2の困難な開発をやり遂げた開発チームの全ての方々に改めて敬意を表したい.
3-2. はやぶさ2宇宙へ
はやぶさ2の打ち上げは元々2014年11月30日に予定されていたが,天候の関係で12月03日に延期された.探査機を立ち上げ,種々の設定を行ない,最終確認の後にプロジェクトマネージャの國中氏からチームメンバへ言葉が伝えられる.
「ここまで地上におけるシステム開発,大変どうもありがとう」
「これから小惑星探査機はやぶさ2を発進させる.そして,再び地球に戻ろう」
自分は,大変だった開発フェーズを乗り切ったことに感慨に耽りながら,はやぶさ2のこれからの長い道のりを想像し,何故だか身震いがした.
日本時間 13h 22m 04s に H-ⅡA ロケット 26 号機によって,はやぶさ2は宇宙に旅たった.打ち上げ方法は特殊で,リフトオフからはやぶさ2の分離までが非常に長かった.探査機は分離後,自動で太陽捕捉を行なった後,太陽電池パネルを展開する.これが探査機にとっての第一関門なのだが,分離後の最初のテレメトリで予定通りシーケンスが完了していることを確認してホッとした(図 4).

Image Caption :
図 4:打ち上げ直後の管制室の様子.
画像クレジット: JAXA/JSPS
その後,日本局の最初の運用で探査機の姿勢確立等を行なった.私はその後の海外局運用の担当(スーパバイザ)であったが,日本局の運用が終わると,ほぼ全ての人がいなくなってとても心細い思いをした記憶がある.ともあれ,はやぶさ2は無事打ち上げられ,長い旅が始まった.
4. 往路巡行フェーズ
4-1. 体制変更
探査機の機能を軌道上で確認する初期運用を終えたころ,プロジェクトマネージャの國中氏が突然部屋にやってきて「佐伯,プロジェクトエンジニアをやってもらうから」と告げた.プロジェクトマネージャが國中氏から津田氏に交代になるのに伴い,津田氏が担当してきたプロジェクトエンジニア(システム取りまとめ)をやれと言うのだ.全くの寝耳に水であり,自信もなかったので「無理です.手に余ります」と返答したものの,「もう決まっているから」と押し切られた.衝突装置の担当になったときと同様に半ば強引に決まってしまった.
2015年04月,津田氏をプロジェクトマネージャとした新しい体制でのはやぶさ2運用チームが正式に動き出した.運用チームの業務は,主に,探査機の日々の運用を確実に行なっていくことと,小惑星 1999 JU3 到着後の運用の計画をたてることの二本立てであった.前者は,有志で組織されるスーパバイザを中心に,システムや姿勢系の担当がサポートを行いながら実施する.小惑星到着までに,探査機の癖を掴み,使い倒せるように慣れておく必要がある.また,後者のために,小惑星近傍フェーズ運用検討チーム(Proximity Phase Planning Team: P3T)を組織した.ちなみに P3T は復路・帰還フェーズでは P4T,拡張ミッションでは P5T となぜか数字がインクリメントされ,運用検討を行うチームとして存続している.
4-2. 往路巡航運用
往路運用の主役は,軌道計画・軌道決定およびイオンエンジンチームである.はやぶさ2は低推力のイオンエンジンを使用した軌道制御を行うため,事前に綿密な軌道計画が立案され,それに従いイオンエンジンを正確に噴射する.決められた方向に,決められた力積を出すように厳密な管理が必要である.また,軌道決定によって探査機の位置速度は定期的に推定され,それに基づいて軌道計画を立案し直すというループが常に行われていた.
往路運用の最初の山場は,2015年12月03日の地球スイングバイであった.イオンエンジンによる軌道制御と,その後の化学推進系を用いた精密な誘導によりはやぶさ2は高度約 3000 km の地点を通過し,リュウグウという名前がつけられた天体に向かう軌道に入った.その後のイオンエンジンによる軌道制御も非常に順調であった.これにより,チームは日々の運用に忙殺されることなく,小惑星近傍運用の計画検討にエフォートを割くことができた.そういう意味で,軌道計画・軌道決定およびイオンエンジンチームは間違いなく後の小惑星近傍運用の成功の立役者であった.
4-3. 小惑星近傍フェーズ計画
新体制になってすぐに,我々は小惑星近傍フェーズの計画の詳細化にとりかかった.それにあたり,私は自分の中で大方針を決めていた.それは,安易に「はやぶさの時はどうしていたか」ということに頼るのではなくて,自分たちなりのやり方でやってみるということであった.探査機製造は脈々と受け継がれた職人の技を最大限に活用し成し遂げたが,探査機運用は自分たちこそが探査機に魂を入れるというつもりであった.そうでなければ我々の成長もないし,面白くない.幸いチームもそういう意気込みをもったメンバばかりであった.
はやぶさ2では,リュウグウに到着してから,実に様々な降下運用を行う必要があった.リュウグウの形状や重力を計測するための中高度観測運用と重力計測運用,MINERVA-II ローバや MASCOT ランダを着陸させる運用,リュウグウ試料を採取するタッチダウン運用,衝突装置を使用して人工クレータを生成する運用と実に多彩であった.そこで,それぞれの運用に主担当を設定し,主担当が責任をもって運用検討を進めるとともに,それを他のメンバーがサポートする体制をとった.若いメンバも臆することなく主担当として手腕を振るった.
小惑星近傍フェーズを成立させるための大きな課題が,スケジュールの成立性であった.はやぶさ2のリュウグウへの滞在はおよそ一年半であったが,途中,小惑星が太陽の後ろに入ってしまい探査機との通信に制約のある合の期間があり,太陽距離が小さいと小惑星表面に降りられない等もあり,実際にタッチダウンを行える期間は思ったよりずっと短い.その中で複数(最大 3 回)のタッチダウンを目指す計画であった.そのため,早々にデイリースケジュールを作成した.合の始まる前に 1 回目のタッチダウンを行い,合明けのスケジュールは,大まかに決めておき,到着後リュウグウの自転軸を確認した後に再検討する方針とした.スケジュール作成といっても,単にイベント(降下運用)を並べるだけでなく,イベントのための準備期間や人員の割り当てが十分か等も含めて検討する必要がある.降下運用のためには,手順の作成とその検証を毎回行うこととしており,手順の作成を担う NEC のエンジニアとともに検討を行なった.表 1 は合前の前半戦運用の計画と実際の運用日を示す.一部他の運用に置き換わっているものの,綿密な事前の計画に従って実際の運用ができていることがわかる.
| 運用 | 計画 | 実際の運用日 |
| 中高度観測運用 | 2018/08/01 | 2018/07/31-08/02 |
| 重力計測運用 | 2018/08/06 | 2018/08/05-07 |
| タッチダウン 1 リハ 1 | 2018/09/09 | 2018/09/11-12 |
| MINERVA 分離運用 | 2018/09/19 | 2018/09/20-21 |
| MASCOT 分離運用 | 2018/10/01 | 2018/10/02-05 |
| タッチダウン 1 リハ 2* | 2018/10/15 | 2018/10/14-15 |
| タッチダウン 1** | 2018/10/22 | 2018/10/24-25 |
* 実際はタッチダウン 1 リハ 1 のやり直し運用
** 実際はタッチダウン 1 リハ 3(ターゲットマーカ分離運用)
4-4. 運用訓練
緻密な計画を立てたとしても,それを実現できるかどうかは別問題である.そのため,早くから運用訓練の必要性は認識されていた.課題は二つあった.2018年06月末のリュウグウに到着したら,08月の中旬にはタッチダウンや小型着陸機の着陸地点を決める必要があり,時間的に厳しいことである.もう一つは,降下運用で探査機を本当に自由自在に操れるのかということであった.これらを訓練するためには,どうしても小惑星の CG(模擬小惑星)が必要であった.
模擬小惑星をどうしようか頭を悩ませていた2015年の07月末,宇宙科学研究所内のシンポジウムで,イトカワの形状モデルを使用したはやぶさの軌道推定に関する発表を行なっていた三浦氏の発表を見て,これだと感じた.すぐに三浦氏に「はやぶさ2で模擬小惑星が必要なのだが手伝ってくれないか?」と声をかけたのだが,10日後には最初の小惑星の CG が送られてきた.その後,理学チームも模擬小惑星の作成にノリノリで参加し,最終的に図 5 のような模擬リュウグウ(Ryugoid)が作成された.
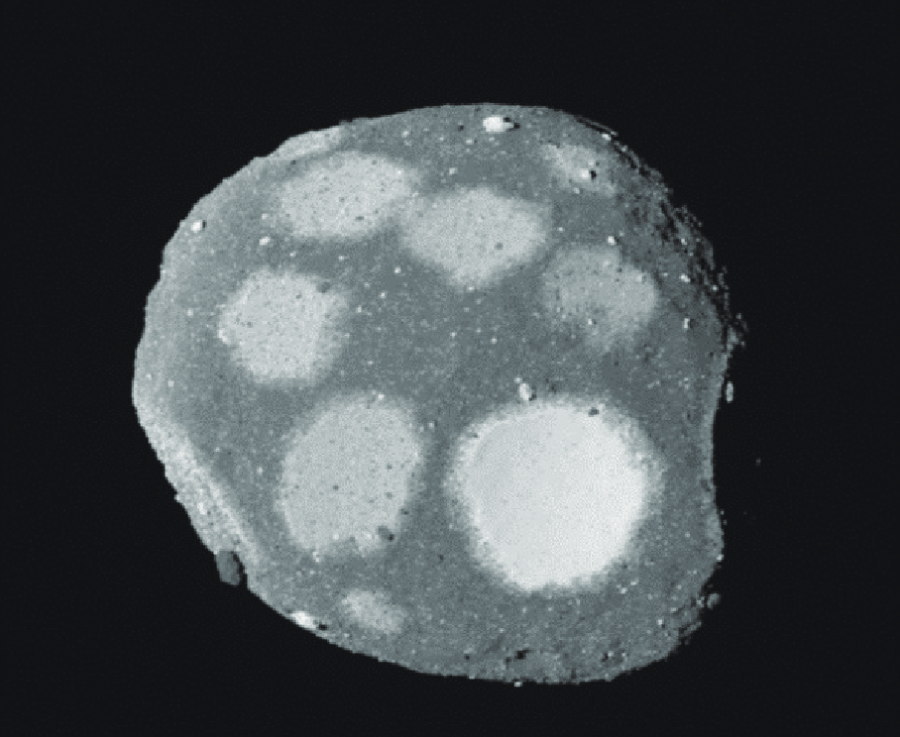
Image Caption :
図 5:訓練のために作成された模擬リュウグウ(Ryugoid).
画像クレジット: JAXA/JSPS
この Ryugoid を使用して,まずは着陸点を選ぶ訓練(Landing Site Selection: LSS 訓練)が行われた [2].Ryugoid の模擬画像から自転軸や形状を再現し,そこから得られる地形情報やサイエンスの議論をもとに,どこにタッチダウンし,どこに小型着陸機を降ろすかを決める過程を国内外の関係者で確認し,最終決定の模擬ミーティングも実施した.これがなかったら,リュウグウに到着後すぐに躓いたかもしれない.
その後,Ryugoid への降下運用の訓練(Realtime Integrated Operation: RIO 訓練)を行なった.これは本当に一筋縄ではいかなかった.最初は表面に近づくこともできなかったが,徐々に探査機を自由自在に動かせるようになってきた.それでも,簡単にはいかず,失敗と改善を繰り返しながら手順等の改良を行なっていった(図 6).訓練には別の大事な効果もあった.RIO 訓練は,最初は工学メンバのみでの実施を考えていたが,理学メンバも積極的に参加し,活動を共にすることでチームの結束を高めることができた.
Image Caption :
図 6:「撃墜」シールが貼られた訓練結果.
画像クレジット: JAXA/JSPS
5. 小惑星近傍フェーズ
5-1. リュウグウへの到着と着陸地点の選定
2018年02月末に,はやぶさ2はそのカメラでリュウグウを初めて観測し,それをもとに軌道修正を行い,06月にはリュウグウへの最終接近を行なった.はやぶさ2が撮像した画像上で日々大きくなるリュウグウの姿を見て,ワクワクしつつ,一年半の近傍フェーズを想像して気の引き締まる思いであった.はやぶさ2は2018年06月27日,リュウグウから 20 km のホームポジション(Home Position: HP)に到達した(図 7).

Image Caption :
図 7:リュウグウ到着時の管制室での集合写真.
画像クレジット: JAXA/JSPS
リュウグウは非常に暗く,赤道付近が膨らんだ形状をしていた.ありがたかったのは,自転軸が公転面に対してほぼ垂直であったということだった.これにより,降下によりアクセス可能な緯度帯が時期によって大きく変化することはなく,合明けの運用スケジュール立案の難易度が減ったからである.その一方で,リュウグウの表面は岩で覆われゴツゴツしており,すぐにタッチダウンは難しそうだと感じた.
到着してすぐに,HP 付近に探査機を維持するための制御を確立し,事前に準備した計画に従って,中高度観測運用と重力計測運用を行なった.リュウグウの重力は計画段階で設定した値と大きく変わらず,降下回数を大きく変更する必要はなかった.着陸地点選定については,LSS 訓練の甲斐もあって形状モデル作成等のプロセスは順調で,事前に決めておいた評価項目に従って着陸地点候補を選出した.2018年08月27日には,国内外の関係者を集めて着陸地点選定会議が行われ,第 1 回のタッチダウンの着陸候補(L 08 という地域)と,MASCOT と MINERVA-II 1 の着陸候補地点が選定された [3].ただし,ここならタッチダウンできるという確信があったわけではない.というのも,リュウグウ全体が岩で覆われていたためである.
5-2. 着陸機の分離運用と方針転換
2018年09月11日には,着陸地点選定会議の結果を受け,L 08 エリアへのタッチダウンリハーサル降下が実施された.しかしながら,高度 600 m 付近で,探査機はレーザ高度計(LIDAR)の出力異常を検知し,自身の判断で緊急上昇を行なった.原因はすぐに突き止められたが,タッチダウンリハーサルで低高度域までの探査機誘導の妥当性を確認した後に MINERVA-II 1 を着陸させる予定が,ぶっつけ本番での実施を余儀なくされた.
私の心配はよそに,MINERVA-II 1 の分離運用は順調に進み,2018年09月21日 13:05(日本時間)に,はやぶさ2は高度 55 m 付近で MINERVA-II 1A と 1B の二つの着陸機を無事分離した.2 機の着陸機は,リュウグウの表面をホップしつつ,多くの画像を我々に届けてくれた.2018年10月04日 10:57(日本時間)には,DLR と CNES が開発した MASCOT を同様に分離した.「何かあれば国際問題だ」と,非常に緊張した運用であったが,分離も予定通り実施でき,MASCOT からも観測データが送られてきた.
MINERVA-II 1 や MASCOT が送ってきた地表面の画像(図 8)は,リュウグウの表面が非常にゴツゴツしていることを我々に改めて認識させた.また,09月頭のタッチダウンリハーサルの中断により,スケジュール的にも厳しくなったため,チームは最初のタッチダウンを合明けの2019年に延期をすることに決定した.そのため10月中旬のタッチダウンリハーサル 2 は,タッチダウンリハーサル 1 のやり直しを行い,10月下旬に予定していたタッチダウン運用は,リュウグウ表面にターゲットマーカを投下する運用に振り替えることになった.従来,はやぶさ2のタッチダウンは,ターゲットマーカの分離とタッチダウンを一度の降下運用で実施する方式を考えていた(ノーマルタッチダウン).一方で,人工クレータの直近に高精度でアクセスするための方法として,ピンポイントタッチダウンという方法も検討を行なってきた.これは事前投下したターゲットマーカ相対で探査機を精密に地表面に誘導する方式であり,これを最初のタッチダウンから実施しようという方針であった.

Image Caption :
図 8:MINERVA-Ⅱ1B が撮像したリュウグウ表面画像.
画像クレジット: JAXA/JSPS
5-3. タッチダウンの準備
新しい方針に従って,10月中旬にタッチダウンリハーサル 1 のやり直し(TD1-R1A)が実施された.既に MINERVA-II 1 や MASCOT の分離運用で経験しているため,低高度へのアクセスも順調で,10月25日 22:44(日本時間)には高度約 22 m に到達し,低高度域で使用するレーザ高度計(LRF)の計測に初めて成功した.
2018年内最後の降下運用は,前述の通りターゲットマーカ投下運用(TD1-R3)であった.探査機は L 08 領域の中でも,平坦な地形が期待される L 08-B 地点に向けて降下を行い,10月25日 11:37(日本時間)に高度 12 m でターゲットマーカを分離し,その後,分離したターゲットマーカをカメラ視野中心に維持するような追尾運動にも成功した.これで年明けのタッチダウン運用に布石を打った状況を作り出せた.ちなみに,私は10月28日には,病院のベッドの上にいた.蓄積したプレッシャーのせいなのか,ターゲットマーカ投下成功の後に飲みに行ってはしゃいだことが原因なのかはわからないが,一週間ほど入院することとなった.年内の降下運用をやり切るまで持ってくれた空気の読める自身の体に感謝した.
ターゲットマーカは狙った地点からおよそ 15 m 離れたところに着地していた.ノーコンと揶揄された結果であったが,元々想定していた着陸精度 50 m からは十分よい精度であった.しかし,ターゲットマーカの側には大きな岩があり,ノーマルタッチダウンを行っていたら,探査機喪失の可能性が大きかった.我々は方針転換が正しかったことを改めて認識した.
探査機は,2018年11月23日から合期間に入った.探査機が太陽の向こう側に隠れてしまい,通信状態が悪くなる期間である.この期間,安全のため,探査機をリュウグウから離れて飛行させた.この間にやるのは,落ちたターゲットマーカ周辺の地形の調査である.ここでは理学チームの方々が大活躍してくれた.理学チームは,リュウグウの観測により多くの学術成果を出しつつあったが,一方で,リュウグウの自転や形状モデルの解析により,探査機運用に直接的で重要な貢献をしてくれていた.今回も,ターゲットマーカ周辺の岩の高さをひとつひとつ推定することで,探査機がタッチダウン可能な領域の割り出しに注力してくれた.
70 cm 以上の高さの岩は,タッチダウンの際に探査機にとって危険であるという中,抽出されたタッチダウン候補領域は二つ.一つは,元々の L 08-B 領域内にある少し広いがターゲットマーカから遠い L 08-B1 領域.もう一つは,ターゲットマーカに近いが,半径 3 m 程の広さしかない L 08-E1 領域.このどちらかしかなかった.議論の結果,ターゲットマーカに近い方が,着陸精度が良くなる見込みが高いため,L 08-E1 領域(というよりもはや点)を 1 回目のタッチダウンの目標に選定した.
着陸目標地点を選定したものの,その狭い領域に本当に安全に降りられるかは,相変わらず解を見出せないでいた.というのも,着陸直前には LRF によってリュウグウの地形を計測し,探査機姿勢を地面に正対するように制御する計画であったが,地形の 凹凸 が激しいため,姿勢の不確定性が大きくなり,着陸精度を確保できない状況であった.2018年も終わろうかという時点でもそういう状況であったが,LRF の計測値に無理やり外部から値を捻じ込むことで姿勢を安定させる方法に辿り着き,その後の膨大な解析により,タッチダウンの目処を得るについに至った.
5-4. 最初のタッチダウン
2019年の最初の降下運用は,第 1 回タッチダウン運用となった.降下運用が始まる前日の深夜まで,最終確認の作業が行われた.準備は万端のつもりであったが,それでも手を動かさないとソワソワしてしまう浮き足立った感じだった.
その準備万端のタッチダウン運用はいきなりトラブルに見舞われた.降下開始の一時間半前に,探査機が低高度で行われるべきシーケンスを開始してしまったのだ.緊急対処がすぐに行われ,原因も究明されたが,これによりタッチダウン運用の延期はやむなしと誰もが思っていた.しかし,運用の延期は,今後のスケジュールに多大な影響があるため,運用チームは必死に復旧を行い,5 時間遅れでの降下開始にこぎつけた.
その後の降下は非常に順調に行われた.誘導の精度が悪いと,落ちているターゲットマーカを見つけられずに,何もせず上昇することになってしまうが,訓練と実機で何度も繰り返してきた降下運用によって改良された制御則と熟練したオペレータにより探査機はターゲットマーカの直上に正確に誘導された.2019年02月22日 7:07(日本時間)に探査機は高度 45 m でホバリングを開始し,すぐにターゲットマーカを捕捉した.以降自律制御により高度 8.5 m までさらに降下し,最終降下位置に誘導され,降下のためのエンジン噴射が行われ 7:29:10s にタッチダウンを行った.探査機はすぐに上昇し,はやぶさで発射できなかったサンプラの弾丸も正しく発射されたことが確認された.
管制室は歓喜の輪ができ,フライトディレクタとして運用に参加していた私もその中で喜びを噛み締めたが(図 9),一方で次の大イベントである人工クレータ生成運用のことが気になり始めた.

Image Caption :
図 9:タッチダウン成功時に抱き合う筆者と津田氏.
画像クレジット: JAXA/JSPS
5-5. 人工クレータ生成運用
人工クレータの生成は,はやぶさ2のミッション目標の一つであり,クレータを作ってそれを確認することは,はやぶさ2の成功基準において最低ライン(ミニマムサクセス)に設定されていた.もし人工クレータの生成が確認できないと,はやぶさ2全体が失敗だと評価されることになる.それもあって,衝突装置の開発責任者であった私は,とんでもないプレッシャーを感じていた.
人工クレータの生成運用は,危険を伴う困難なものであった.衝突装置は爆薬を使用しているため,動作時に高速破片を撒き散らすことがわかっており,それを避けるため,探査機は衝突装置を分離してから 40 分間で小惑星の裏側に退避する必要がある.これに失敗すると探査機を喪失することになる.また退避の途中で観測のための分離カメラ(DCAM3)を分離するのだが,これを正確な位置で実施しないと,撮りたい写真が撮れないことになる.探査機を極めて精度良く移動させていかなければならないという難しい運用であった.
人工クレータ生成運用の準備は,タッチダウン運用の準備と並行して進められていたため,どうしても二の次感があったのだが,それでも誘導制御担当の三桝氏や DCAM3 の担当たちとともに,綿密なシーケンスを検討し,緊急事対処等も決めて行った.また,タッチダウン運用の準備で忙殺されていた2019年01月16日に,実機を使ったエンジンの長時間噴射の試験(退避リハーサル)を行って,エンジン噴射時の姿勢制御と太陽電池パネルの振動のカップリングについての確認を行った.
2019年03月22日,クレータを作る予定の S 01 と呼ばれる領域の周辺の地形情報を観測した.この S 01 という領域は,工学チームが 1 回目のタッチダウンの準備をしている間に,理学チームが見つけ出したリュウグウの中でも比較的平坦な領域であり,人工クレータの生成目標とされていた.また,その後の 2 回目のタッチダウンの有力な候補地点でもあった.
2019年04月04日,ついに人工クレータを作るための運用が始まった.私はフライトディレクタと衝突装置担当を兼務していた.開発時に苦労をともにした衝突装置開発チームの面々も集まってくれ,心強いと思う反面,絶対に成功させなければという思いで胃に穴があきそうな状態であった.探査機の降下は極めて精度良く行われた. 04月05日 10:04(日本時間)に,最終の GO コマンドが送信された.これ以降,探査機は完全自律モードに移行し,引き返すことはできない.衝突装置は 10:56 に分離され,その後の退避も順調で,11:14 に DCAM3 の分離を迎えた.DCAM3 は打ち上がってから初めて電源が入り,そのテレメトリを確認した DCAM3 のチームが湧き上がり,私もほっとした.衝突装置の作動は 11:36:10s であった.このとき探査機と地球は非常に離れていたため 17 分半ほどたって,テレメトリが地球に降りてくる状況であった.作動の瞬間のテレメトリには何の変化もなく,探査機が健全であることを示していた.「退避成功ですね.おめでとう」とプロジェクトマネージャから声が上がり,管制室では拍手が起こった.
フライトディレクタとしての自分は退避の成功に安心したが,衝突装置担当としては,やはり本当にクレータができたのかが心配で心からは喜べなかった.モヤモヤした気持ちで運用を続けていると,管制室にプロジェクトサイエンティストの渡邊氏が現れ,「一応 DCAM のアナログにイジェクタが映っています」と告げた.「えー!」と驚き,画像を見るために運用室に向かった.そこには小さいながらもリュウグウから噴き出るイジェクタがあった(図 10).泣くなんて思ってもいなかったが,これまでのことを思い返すと自然と涙が出てしまった.

Image Caption :
図 10:リュウグウ表面から噴出されるイジェクタ(デジタルカメラの画像,最初にイジェクタを確認したのはアナログカメラの画像であった).
画像クレジット: JAXA/神戸大/千葉工大/高知大/産業医科大/JSPS
2019年04月25日,探査機は高度 1.7 km の位置から,03月22日と同様に地形情報を観測した.クレータ生成の事前事後の画像を比較することによりクレータを探す予定であったが,DCAM3 の画像でおおよその位置が分かっていたこともあり,狙った地点からおよそ 20 m 北西に直径 15 m ほどのクレータがすぐに見つかった.地上試験でのクレータの大きさとはかけ離れた大きなクレータであった.小さなクレータしかできないという夢を何度も見たのはなんだったのか.
5-6. 2 回目のタッチダウン
1 回目のタッチダウンが大成功だったこともあり,3 回目のタッチダウンはやらないことに決定したが,チームは 2 回目のタッチダウンに向けてすぐに着陸点選定のための作業を開始した.クレータの南側には詳細観測済みである S 01 という平坦な地形が広がっており,探査機を安全にタッチダウンさせるためには都合が良かったが,DCAM3 の画像や,探査機搭載カメラの画像は,クレータの南側には地下物質はあまり積もっていないことを示唆していた.一方で,クレータの北側は,地下物質は多いかもしれないが,凹凸 が激しく,詳細な地形データは未取得であった.2019年04月29日の最終の着陸地点選定会議においても,北側か南側かの議論がなされたが,最終的には地形情報が既知であり,より安全そうである南側の S 01 領域が選ばれた.
2019年05月16日,S 01 領域にターゲットマーカを投下する運用の最中に探査機が,高度 50 m で緊急上昇した.原因は LIDAR の計測異常であった.ターゲットマーカの投下という目標を達成できなかったため,チームは落胆したが,一方で嬉しい誤算があった.こんなこともあろうかと仕込んでいた緊急上昇時のカメラ撮像が,クレータの北側の領域を捉えていたのである.画像の中には狭いけれども平坦に見える領域があった.この領域の地形を理学チームが突貫で解析し,工学チームによって着陸安全性解析が行われた結果,着陸実行可能であると判断され,タッチダウン目標が,C 01-Cb と名付けられたクレータ北側に変更された.
チームが 2 回目のタッチダウンに向けて進む中,主にプロジェクト外からタッチダウン実施そのものの是非を問う声が起こっていた.はやぶさ2は 1 回目のタッチダウンで採取した試料を持っている状態であり,2 回目のタッチダウンで何かあると,それすらも失われる可能性を心配してである.工学チームは探査機の安全をしっかりと担保できることを示すことで,2 回目のタッチダウンをなんとか実施できるように準備を進めた.理学チームの「工学チームを信頼します」という後押しもあり,最終的に GO の判断が下された.
2019年07月11日 10:06(日本時間)に, はやぶさ2は再びリュウグウに舞い降りた.1 回目のタッチダウンで舞い上がった砂塵で光学系の性能が落ちていたため,難易度が上がっていたが,着陸の精度は約 60 cm を達成した(図 11).プロジェクトマネージャによって 100 点満点中 1000 点と評された,完璧な 2 回目のタッチダウンによって,日本は世界に明確に差をつけることができた.

Image Caption :
図 11:2 回目のタッチダウン直後の搭載カメラの画像.
画像クレジット: JAXA/JSPS
6. 地球帰還フェーズ
6-1. リュウグウ出発と復路巡航運用
2 回目のタッチダウンの後も,ターゲットマーカや MINERVA-II 2 ローバをリュウグウの周りに周回させる等,さらに成果を積み上げていったはやぶさ2も,リュウグウを離れる時がきた.2019年11月13日,はやぶさ2はスラスタ噴射によってリュウグウを離脱した.もう二度と来ることはないであろうリュウグウとの別れを惜しむかのように,離脱中に最後の撮像を行なった.ちなみに,拡張ミッションで行けそうな天体を探すと,いつもリュウグウが出てきて,しみじみとしたお別れが台無しになるような気がした.
リュウグウ離脱後,ずっと使用していなかったイオンエンジンの健全性を確認した後,2019年12月03日から地球帰還のためのイオンエンジン運転が開始された.復路は,カプセルを豪州の砂漠にドンピシャで着陸させなければならないため,地球スイングバイ時と異なり,位置速度とともに時刻も厳密に制御されなければならない.イオンエンジンチームとともに,軌道決定チームおよび軌道計画チームの確実な軌道操作によって,はやぶさ2は着実に地球に近づいていった.
2020年08月28日にイオンエンジンを一度停止し,軌道決定を行った後,再点火による軌道修正を09月17日に終え,はやぶさ2ノミナルミッションでのイオンエンジン運転は全て完了した.イオンエンジンは最初から最後まで確実に動作したため,イオンエンジンチームは拡張ミッションというさらに 11 年の「おかわり」をもらえることになった.
6-2. 精密誘導とカプセルの分離
10月からは精密軌道決定と化学推進系による地球への精密誘導フェーズへと移行した.それと同時に,カプセル分離のための機上試験も行われた.2020年11月04日には,実機を使ったカプセル分離運用リハーサルを実施した.本番を模擬して,探査機の姿勢を大きく変更し,運用計画の妥当性や地上での確認体制に問題がないことを確認した.
軌道制御で最も重要なイベントは,3 回目の軌道修正(3rd Trajectory Correction Maneuver: TCM-3)と呼ばれるものであった.それまでは,はやぶさ2は地球のそばを通過する軌道にいたが,TCM-3 で探査機を初めて地球に突入する軌道に入れる計画であった.しかも,予想着陸点がウーメラ管理区域(WPA)内からはみ出てはならないので,非常に厳密な軌道修正が要求される難しい運用であった.前日に豪州帰還安全担当官からはやぶさ2を WPA に突入する軌道に入れる許可が出され,11月26日に TCM-3 が実施された.化学推進系を噴射している間の姿勢誤差も考慮した複数回のエンジン噴射で,1.2 m/s 程の大きな速度変更にもかかわらず,3.5 mm/s 程度の速度変更誤差にとどめることができた.
12月01日には,地球帰還前の最後の軌道修正となる TCM-4 を実施し,12月05日,ついにカプセル分離の日を迎えた.そこで,本稿の冒頭のような会話になるわけであるが,着実な準備とチームの力で,カプセル分離と探査機の地球離脱をやり遂げ,拡張ミッションに繋げることができた.この後,カプセルは綺麗に大気圏に突入し,オーストラリアでは回収班が 5.4 g もの試料のはいったカプセルを素早く回収した.回収班の奮闘については [4] を,拡張ミッションについては [5] を参照されたい.

Image Caption :
図 12:地球に再突入したカプセルの航跡.
画像クレジット: JAXA/JSPS
7. はやぶさ2からの教訓と将来計画について
7-1. はやぶさ2からの教訓
はやぶさ2からの教訓は,チームメンバによって山のように抽出されたが,筆者個人が感じたことをいくつかピックアップしたい.
はやぶさ2のような大規模ミッションでは,個人の力ではどうしようもなく,チームの力が不可欠である.しかし「本気」でない人が集まったとしてもそれはチームにはならない.本気でミッションをやる人が集まるには,ミッションが魅力的である必要がある.幸い,はやぶさ2は多くのチームメンバがミッションに魅力を感じ,本気で「楽しむ」状況にあったと感じる.世界初,世界一のような要素を取り込み,チームメンバが本気でやりたいと思うミッションとすることが重要である.
上記に加え,チームが連携して機能的に活動するためには,メンバ相互の信頼感が不可欠である.信頼感は個人の本気にも繋がる.はやぶさ2では,訓練など「同じ釜の飯を食う」場面が多くあり,理工学,JAXA と大学,関連企業の結束が高まる結果となった.探査機のカメラが航法と科学観測を兼ねていたことも,理工の連携を促した.これは設計的には改善の余地があるのであろうが,チームの成熟という意味では非常に大きな効果があった.また,「信頼するけど信用しない」という相互チェックがチームとしてうまく機能したと感じている.昨今は業務および責任分担の明確化ということが重要視されているが,チームメンバが互いのやることを尊重しつつ,別の人のやっていることに興味や注意を払い,任せきりにならないという空気が非常に大切であると思う.
探査システムという観点からは,はやぶさ2では小型着陸機や衝突装置, DCAM3 等の小型子機の有用性が示された.単体の探査機でできることは限りがあるが,小型子機を使うことでミッションの質を高めることが可能であることが強く認識された.小型機は親機に目標天体まで連れていってもらえるため,単機能でも野心的なミッションが可能になり,昨今注目されている超小型衛星の技術はこのような場面で活かせるのではと感じている.
2 回目のタッチダウンの実施の是非が問われたことも,大きな教訓である.決して高頻度とは言えない日本の太陽系探査では,一つ一つのミッションを確実に実施するとともに,無謀ではないチャレンジはしっかりと行える状況を整える必要があると考える.そのためには柔軟性の高い探査システムを検討する必要がある.
7-2. 次世代小天体サンプルリターン計画
現在,はやぶさ2に続く次世代の小天体サンプルリターンミッションについて検討が開始されている.本来はやぶさ2のミッション期間中にも将来ミッションの検討を進めるべきであったと反省しているところだが,ともあれ,ようやくスタートを切ることができている.
探査天体については,理学メンバを中心に検討中であるが,未到の遠方天体を中心に議論が行われている.探査システムとしては,地球-目標天体間の輸送を担当する往還機と,現地での着陸探査を行う小型の着陸機で構成されるシステムを検討している(図 13).前述のはやぶさ2の教訓を活かしつつ,将来の重力天体探査にも繋がる自在性の高い探査システムを目指している.サンプルリターンを行うためには,着陸機から往還機へ天体試料の受け渡しを行う必要があるのだが,それには,はやぶさ2のターゲットマーカを使用したピンポイントタッチダウンの技術を応用することを考えている.
探査ミッションの数が多くない日本では,一級の科学とともに,将来に向けた技術革新を両立させる必要がある.それは簡単なことではないが,多くの方々が本気で参加できるミッションとして何とか実現したいと頑張って活動しているところであるので,本稿をご覧になって興味を持って活動に参加いただける方が少しでも増えれば幸いである.
8. おわりに
今回,はやぶさ2ミッションの振り返りをまとめる執筆機会を頂けたことに感謝しております.はやぶさ2の地球帰還から早一年半以上が経過し,チームの解散で,寂しい思いをしていたところ,苦しくも楽しかった日々と,その時の熱い気持ちを思い出すことができました.はやぶさ2で得られた経験や人脈といった宝物を有効に活用し,将来につなげていくことが,筆者を含むはやぶさ2のチームメンバのこれからの使命だと思っております.
最後に,この素晴らしいミッションを大成功させたプロジェクトチームを誇りに思うと共に,全ての関係者の皆様に心から感謝いたします.
参考文献
[1] 吉川真, 2018, 遊星人 28, 320.
[2] 石原吉明, 2017, 遊星人 26, 139.
[3] 菊地翔太ほか, 2019, 遊星人 28, 143.
[4] 中澤暁ほか, 2021, 遊星人 30, 18.
[5] 嶌生有理ほか, 2021, 遊星人 30, 169.
お読み頂いた感想等の投稿フォーム
責任を持って主著者にお届けします。お名前は本名以外でも構いません。Email アドレスは自動返信用であり、収集・公開しません。

Akira IMOTO
Editorial Chief, Executive Director and Board of Director for The Planetary Society of Japan
Web edited : A. IMOTO TPSJ Editorial Office