次世代太陽系探査
はやぶさ2からポストはやぶさ2へ : March 20, 2020. Latest
Hayabusa2 DCAM3 デジタル系の開発
原文 - 日本惑星科学会誌「遊・星・人」第28巻(2019)3号 - PDF
Hayabusa2 DCAM3 デジタル系の開発
火の鳥「はやぶさ」未来編 その 19
小川和律1,白井慶2,澤田弘崇2,荒川政彦1,本田理恵3,石橋高4,和田浩二4,門野敏彦5,坂谷尚哉2,中澤暁2,早川基2
1.神戸大学 2.宇宙航空研究開発機構 3.高知大学 4.千葉工業大学 5.産業医科大学
※ この遊星人記事は、日本惑星科学会遊星人編集専門委員会より許可を得て掲載しております。
要旨
小型・分離型のカメラシステム DCAM3(分離カメラ)は,Hayabusa2 が小惑星 Ryugu 上で衝突実験を行う際に探査機から分離され,近傍から衝突の観測を行なった.DCAM3 は,イジェクタ飛散の詳細な様子を高い空間分解能で撮影するための科学観測用カメラシステム「デジタル系(DCAM3-D)」を持つ.このデジタル系は,Hayabusa2 がより高いレベルの科学目的を達成するために遅れて搭載が決定されたもので,提案から開発・完成に至るまでの全てが険しい道のりだった.様々な課題を克服して成功を収めた成果は挑戦的な科学観測機器の開発の重要性を訴えている.
1. はじめに
DCAM(Deployable Camera : 分離カメラ)とは,惑星探査機本体から分離された後に,探査機から離れた場所で可視光撮像を行い,無線通信によってデータを探査機に送るというコンセプトを持つ,大きさ 10 cm 程度の小型・分離型のカメラシステムのことである.JAXA エンジニアの澤田弘崇が中心となって開発し,現在まで DCAM1 から DCAM3 までの三機が実際に探査機に搭載された.DCAM1・DCAM2 はソーラ電力セイル実証機 IKAROS の本体から放出され,宇宙空間で IKAROS が正しく帆を張ったかどうかを確認する役目を果たした.DCAM3 は小惑星探査機 Hayabusa2 に搭載されて,同じく探査機から分離される SCI(Small Carry-on Impactor : 衝突装置)[1] が小惑星衝突実験を行う様子を間近で観測する役目を担った(図 1).この時,Hayabusa2 本体は SCI の爆発片や衝突イジェクタの直撃を避けるために小惑星の裏側遠方に退避するので,衝突の瞬間を観測することができない.DCAM3 は衝突~イジェクタ飛散の様子を確認する唯一の手段である.
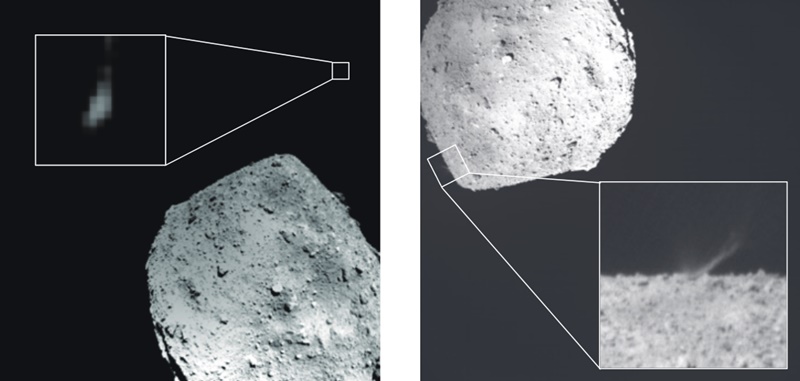
Image Caption :
図 1. DCAM3 デジタル系が撮影した Ryugu 上での SCI 衝突実験前後の画像(2019年04月05日).(左)SCI 作動の約 185 秒前.Ryugu 上空に SCI 本体が見える.(右)SCI 作動の約 3 秒後.着弾と同時にイジェクタが噴出し始める様子が確認できた.以降の時間帯の画像は,順次探査機から地上へ送信して,解析を進めている.(画像のクレジット: JAXA,神戸大,千葉工大,高知大,産業医科大)
Image : 遊星人
DCAM3 はその小さい筐体の中に,リアルタイム性を重視したモニタカメラと,衝突イジェクタの詳細な様子を記録するための高空間分解能な科学観測用カメラの二種類を内蔵していて,カメラの出力方式の違いから前者をアナログ系(DCAM3-A),後者をデジタル系(DCAM3-D)と呼んでいる.このうちデジタル系は Hayabusa2 開発期間の後期になって追加で実装が決定したもので,その生い立ちと開発には様々な困難と紆余曲折があった.以下では,恐らく Hayabusa2 の中でも最も特異な機器である,この「DCAM3 デジタル系」がこれまで辿ってきた道のりを紹介したい.それは小型で目立たないが,科学観測機器としてゼロから開発し,リスクの高い挑戦的機器として成功した,近年では稀な機器である.このことは理学分野での観測機器開発の重要性を投げかけている.
2. 事の起こり
2011年夏,Hayabusa2 は既に計画が認可され,探査機や搭載機器の検討・開発が進んでいた.特に小惑星地下物質を掘り起こす目的で,Hayabusa 初号機には無い SCI の搭載と,それを使って行う衝突実験が大きな目玉となっており,工学的な挑戦に注目が集まった.一方で,探査計画の理学目的とその重要性の検討がまだ手薄であるとの指摘が宇宙科学研究所(ISAS)内外から出されており,理学側の体制強化が課題であった.これを克服するには国内の惑星科学者から更なる協力を得ることが必須だが,当時の固体惑星探査は現在ほど学会に浸透しておらず,簡単ではなかった.それは日本の固体惑星探査が未だ駆け出しで,Hayabusa 初号機は工学実験探査機として理学研究者が少数参加するに留まり,次の月周回衛星 Kaguya が固体惑星系の科学探査としてようやく成功を納めた状態だったからである.科学コミュニティから見れば,固体惑星探査は ISAS を中心とする一部の関係者が行うもので,情報共有と協力関係が圧倒的に不足していた.
この課題に対して目論んだことの一つは,天体衝突現象の専門家で,かつ科学コミュニティに多くの繋がりを持つ研究者らを SCI 衝突実験の理学検討に加えることだった.その説得で鍵となったのは,DCAM3 による衝突現象の科学観測である.SCI によって作られるクレータの観測に加えて,衝突の瞬間に発生する衝突イジェクタを詳細に観測できれば,それは世界的に類を見ない新しいデータを得る絶好の機会で,SCI の衝突実験に天体衝突科学の先鋭的な意義を与える.特にイジェクタコーンの高さ・幅・角度を正確に知ることがクレータスケール則の検証と小惑星表層の物理状態の推定のために必要だった(詳しくは [2, 3] を参照されたい).しかし当時の DCAM3 は,理学ではなく工学を目的とした,いわゆる工学機器として設計が進んでおり,限られた予算の中で DCAM1, 2 の設計を極力流用し,SCI 衝突弾丸の小惑星着弾の有無を確認する目的に特化したカメラ(現在のアナログ系)のみの構成となっていた.これではイジェクタの詳細観測には撮像性能が足りない.斯くして,緊急にイジェクタの科学観測に耐えるカメラの検討を始めることになった.
3. 検討と提案,動乱,搭載決定まで
新しいカメラシステムには,高解像度のモノクロ CMOS イメージセンサと高性能レンズを使い,また無線通信にはその画品を落とすことなく探査機に伝える高速デジタル通信を採用する方針として,これらの概念検討を急ピッチで進めて搭載を提案することになった.しかしこの時点で DCAM3 は全体の基本設計を終えていたので,その全てをひっくり返す提案が容易に承諾されないことは想像に難くない.事実,これには DCAM3 の開発責任者である澤田はもとより,プロジェクト全体が難色を示し,大変に揉めた.新カメラの検討チームは,前述の通りデジタルカメラシステムの搭載が Hayabusa2 理学の強化の要だと信じて,覚悟を持って主要関係者のもとに日参し,時には「理学こそ正義」と揺すったり,時には泣き落としながら,あの手この手で説得と調整を試みた.何とも迷惑な話であったと思う.しかしその実は,澤田こそ一見意に介さない姿勢の裏で理学側の度を超えた提案を真面目に検討し,現実的な解を模索していたのである.
当時,我々の取れる道は三つあった.すなわち(a)既存の DCAM3 を全て撤廃して新しいカメラシステムに置き換える.これはシンプルで電気設計がしやすく,サイズ・重量も節約できるが,ほぼ全てが新たな設計になる.(b)DCAM3 を拡張して新しいカメラシステムと無線通信機を追加する.これは構造が複雑でサイズ重量が増えるが,新旧カメラが目的の一部を共有する冗長系になる.あるいは(c)あきらめる.方針はしばらく(a)と(b)の間で揺れた.どちらを選択するにせよ,それまで積み上げたものの大部分を崩すことになるので,関係者全員の目的意識を徐々に同じ方向に向くよう修正していく中で,明に暗に多くの葛藤と攻防があったことを覚えている.無数の調整と数回の有識者会議を経て,既存設計の一部を流用でき,また冗長性を持つことを評価して,最終的に上記(b)を採用することになった.さらに,カメラと無線通信の方式の違いにより既存系統をアナログ系,新しい系統をデジタル系と呼び分けて,両者は筐体と電源のみを共有ながら完全に独立な電気系統を持つこととした.
最後の山場は,デジタル系の追加搭載と,それに伴う DCAM3 の抜本的な設計変更をプロジェクトに正式に認めてもらうことである.これには DCAM3 の詳細設計審査(CDR)まで待たねばならなかった.デジタル系の科学的重要性の浸透に時間を要したことと,新しい DCAM3 の技術的成立性が不透明だったことが理由である.これらの説明のため審査会で DCAM3 チームが準備した資料は 600 ページ以上に及んだ.このような経緯を経て,2013年の始め,新しい DCAM3 の搭載がついに正式に決定した.
4. 苦難の設計 - あと100ミクロンだけ
DCAM3 は複雑なシステムである.分離される小型カメラユニットには電源系,アナログ系・デジタル系それぞれのカメラ・制御部・無線送信機・アンテナがあり,自動観測や画像圧縮の機能なども持つ.探査機本体の側では,カメラユニットを比較的高速(0.7 m/s)に分離・放出して,同時に姿勢安定用のスピンを与える分離機構を始め,受信アンテナ,無線受信機,システム全体の制御ユニットと大容量データストレージがあり,自動シーケンスやメモリパトロールの機能も持つ.サンプラホーンモニタカメラ(CAM-H)も DCAM3 アナログ系の一部である.DCAM3 は探査機本体から分離後,分離カメラ側と探査機側の各コンポーネントが息を合わせて自動で衝突現象の撮像を行なっていく.このようなシステムにデジタル系を追加で共存させたことは DCAM3 全体で様々な課題を呼び起こした.
デジタル系システム内の開発課題も無数にあったが,その全てを紹介することは困難なため,以下にその中の幾つかのエピソードを紹介する.特に初期の課題となったのは SCI の視認問題である.まず図 2 に SCI 弾丸射出時の DCAM3 の観測条件を示す.
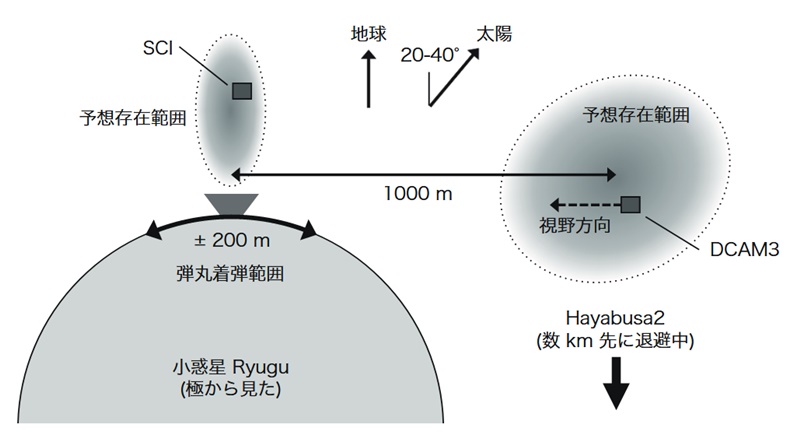
Image Caption :
図 2. Hayabusa2 衝突実験の弾丸射出時における SCI,DCAM3,小惑星の位置関係.
Image : 遊星人
弾丸は指定時刻に SCI の作動によって射出され,小惑星上の地球直下点 ± 200 m の範囲のどこかに着弾する.DCAM3 はこれを側面の約 1 km 遠方から観測することになる.なお,撮像した画像は探査機本体に順次無線送信される.SCI と DCAM3 は探査機本体からの分離時に初速度誤差があるため,SCI 作動時にはそれぞれおよそ図に示す範囲のどこかに存在する.科学目的のためには弾丸の衝突角度を決定することが必要なので,DCAM3 はこの範囲のどこに居たとしても,SCI 作動後のイジェクタコーンに加えて,作動直前の SCI 本体を視野に収めて検出できることが条件になる.しかし SCI 本体は存在範囲が広い上に小型で検出が難しく,加えて DCAM3 は姿勢安定のために視線軸回りに約 100 deg/sec で回転させるので露光時間を長く取ると画像が滲んでしまう.そのため広角で明るく結像性能が高い,かつ小型軽量な特別な光学系が必要だった.最終的にこの部分はコスト配分を高めて,非球面レンズを用いて設計・製作することで,視野角 74° x 74°,F 1.7, 結像性能(2 x 2-pixels ensquared energy)> 50 % を Φ30 x 43 mm の小型サイズで実現した.
同時に問題となったのは,やはり小型化だった.探査機全体の設計が既に進んでいたため DCAM3 システムに与えられた体積は変更できない.前述の通りアナログ系・デジタル系の同居を方針としたので,特に分離するカメラの内部では,電池を共有しつつ,光学系,イメージセンサ,電源用基板,制御用基板,通信用基板のアナログ系・デジタル系の 2 セット分を直径 7 cm の円筒形の筐体内に配置しなければならない(図 3).
Image Caption :
図 3. DCAM3 分離カメラ部の構造.突起部を除く円筒形筐体のサイズは Φ 80 x 78 mm.
Image : 遊星人
光学系とセンサは必要な撮像性能を満たす以上は小型化に限度があるので,課題は電子基板の小型化に集約される.これは実際には開発期間,開発コスト,基板のノイズ耐性・放射線耐性とのトレードオフになるため,全体配置を調整しながらサイズの落とし所を探る作業である.これは協力メーカ,またアナログ系側との膨大な調整と試行錯誤を要する,最も苦労した課題になった.最終的には,筐体設計を担当する澤田に円筒形筐体の直径を 8 cm に拡大することを許容してもらい何とか収めることができたが,終盤では「あと 100 ミクロンだけください」などと涙ながらに嘆願することになった.出来上がった電子基板は端をヤスリで削るなど,ミクロンオーダーまで小型化に務めた.
厳しい小型化と低コストの要求のため,デジタル系の主要な電子部品には宇宙グレードではなく産業用部品を用いた.これは電子基板の小型化・省電力化に有効だが,一方で幾つかの問題への対処が必要となる.その一つは耐環境性(特に放射線への耐性)の検証と保証が不十分なことである.基板設計・製作に当たっては全ての電子部品に対して独自に放射線照射試験を行って耐性を確認したが,偶発的に発生することが避けられないラッチアップ1) とアップセット2) のリスクに対しては,発生確率を試験で確認したのち,設計で対処した.ラッチアップに関して,DCAM3 は SCI 衝突の前後数時間のためだけに存在する機器で,この間は何が起きても観測を停止するわけにはいかない.そのため電源部に過電流検知回路を追加して,ラッチアップ発生時は自動で電源停止・再起動されるようにし,また自動観測中の状態を常に不揮発メモリ記録しておき,再起動されると観測シーケンスの続きを自発的に再開する機能を実装した.アップセットに関しては,まずデジタル系は数時間の観測で 1 GB 以上のデータを得る.探査機本体のデータレコーダは容量が小さく使用できない上,全てを地球に送信するには長期間必要なので,独自に大容量の不揮発メモリを持たせた.その上で,データを長期保存する間にアップセットのリスクがあるため,全データを三重冗長で記録し,さらに多数決でビット反転を修復するメモリパトロール機能を実装した.
1). 高エネルギー粒子の衝突によって,半導体内に意図しない電流パスが発生して過電流が流れる現象.多くの場合は一旦電源を OFF にすれば解消する.
2). メモリ内に高エネルギー粒子が当たり,ビットの 1 と 0 が反転する現象.
新しい DCAM3 の設計では一つだけ妥協しなければならなかったものがある.それはアンビリカルケーブルである.もともと DCAM3 は「可能な限りシンプルに」というコンセプトから,分離カメラ部と分離機構との間は電気的な結線(アンビリカル)が無く,分離時にマイクロスイッチが解放されることで初めて内部電池から通電される仕組みになっている.つまり,分離カメラは打ち上げから分離までの間は電源を投入できず,軌道上での動作テストや高性能カメラの撮像などもできない.新しい DCAM3 はデジタル系を加えて複雑化・高機能化・高性能化したため,この点はバランスを欠く.しかし Hayabusa2 の中で DCAM3 に与えられたリソースと開発期間では,アンビリカルケーブルと,それを分離前に分断する機能はどうしても追加することができなかった.その結果,衝突観測時の動作を打ち上げ前に全て精密に決定して,分離後にそれが自動駆動されるように仕込む必要に迫られただけでなく,DCAM3 の正に「1 か 0 か」という挑戦的な特性をより色濃いものにした.しかしそれ以上に,打ち上げから本番の観測までの四年間,「果たして本番でカメラが正常に起動してくれるのか」と心臓を掴まれる思いで心配し続けなければならないことが精神衛生上の大きな負担になった.
DCAM3 の再設計は Hayabusa2 の他の機器へも影響を与えている.その一例は図 4 に示す SCI 側面に巻きつけた拡散反射膜である.
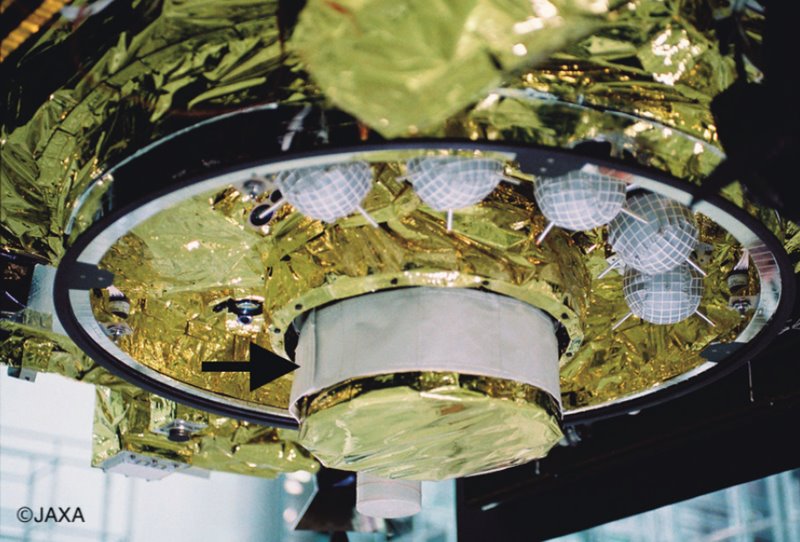
Image Caption :
図 4. DCAM3 からの視認性の向上のため SCI の側面に追加されたベータクロス(黒い矢印).通称「腹巻」.
Image : 遊星人
この部分はもともと多層断熱膜(MLI)の金色の鏡面反射面だったが,これでは太陽光の当たり方が偶然良好にならない限り宇宙空間で真っ黒くなり,DCAM3 からは視認できない.そのため SCI の側面をベータクロス(国際宇宙ステーション外面に使われている白色の素材)で覆うように何とかお願いすることになった.これは SCI 開発責任者の佐伯孝尚が「腹巻」と称して以降,そのように呼ばれている.
このような数々の課題を克服して,新しい DCAM3 は明確な理学・工学目的を達成するために改めて最適化され,より確かな科学観測機器に生まれ変わったのである.
5. 完成まで - 木曜日の朝04時に
DCAM3 の開発では,試作機やフライトモデルを製作した後の機能・性能の検証試験も大きな山場の連続だった.その理由は5つある.(a)後発のため開発期間が一般的な機器の半分だったこと,(b)DCAM3 が「JAXA インテグレーション機器」であったこと,(c)ほぼ全ての電子部品が産業用グレードであったこと,(d)科学観測用カメラを持つこと,(e)コンポーネント数が多く構成が複雑だったこと,である.
それぞれについて,(a)は言わずもがな,(b)について,DCAM3 は一部の設計・製作に加えて組み立てや検証試験の多くを,協力メーカの手を借りずに機器開発チームが行うことにしていた.そのため必然的に機器担当研究者に多くの作業負荷がかかった.この方式は小型機器の低コスト化や柔軟な開発に有効だが,問題が発生した時の責任分担が曖昧になるため近年は避ける傾向にある.恐らく今後の中型・大型の惑星探査ではこのスタイルは無くなり,DCAM3 は研究者らが自分たちでネジを締めた最後の科学観測機器になるかもしれない.(c)から(e)は互いに関連している.(c)については前章で述べた内容に加えて,特別に設計・製作した光学系でも,使用したい硝材の幾つかに放射線耐性が不明なものがあった(レンズは放射線により着色する)ので,このための放射線耐性確認試験を行う必要があった [4].(d),(e)について,製作後に必要となる検証試験の数は,大雑把には「コンポーネント数×機能・性能・耐環境性の設計要求項目の数」となる.DCAM3 システムは構成コンポーネントの多さに加えて,さながら一つの超小型衛星のような機能を持っており,さらには科学を目的とした観測に特有の精密な性能要求があったため,試験の数は一般的な機器の数倍に及んだ.
機器開発の多くの場合で共通ではあるが,特に DCAM3 では上記の状況が相まって,開発終盤は時間との戦いだった.その中で特に印象に残っているのは熱真空試験である.この試験では,真空環境に晒した機器に温度変化を与えて,所定温度での動作,温度変化の耐性,熱設計との整合性などを確認する.とにかくスケジュールが押していたため,1時間単位で定義した作業要求に従って24時間体制を取り,準備を含めて一ヶ月以上の間,コンポーネントを入れ替えながら休みなく試験を継続した.ちょうどこの頃だったと思うが,澤田に次回の打ち合わせを申し込んだ際,「木曜日の朝04時なら」という返事が返って来たので快諾したことがある.とりわけ珍しいことではないかもしれないが,その頃のスケジュールの逼迫具合を象徴する出来事として記憶している.試験方法も特徴的で面白く,図 5 は分離カメラを真空槽の中に設置した時の写真である.
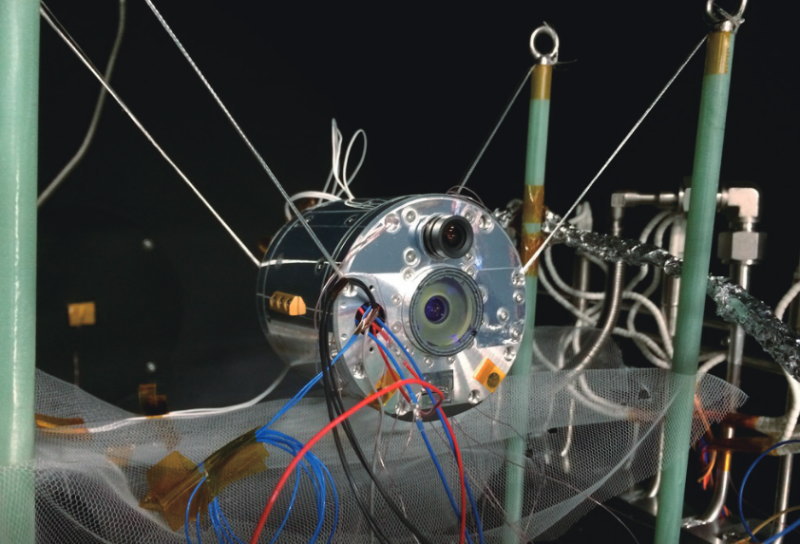
Image Caption :
図 5. 熱真空試験(熱バランス試験)にて真空槽内に分離カメラを設置した様子.
Image : 遊星人
筐体表面の熱特性を検証するために宇宙空間で浮遊した状態を模擬する必要があったので,市販の釣り糸で吊ることを考案して試験を行った.見た目があまりにも心臓に悪いということで,筐体の下に落下防止のための防護ネットが取り付けられている.
最終的に,アンビリカルケーブルの心残りを除いて DCAM3 の全ての製作と検証試験は問題無く完了させることができた.図 6 は DCAM3 全コンポーネントのフライトモデルの写真である.

Image Caption :
図 6. DCAM3 システムの構成コンポーネントのフライトモデル.それぞれ「DCAM3」とあるのが分離カメラ部と分離機構,DCAM3-ANT はアナログ系受信機とデジタル系受信機を内包し,上部にアナログ系用の受信アンテナを乗せたもの,DCAM3-ANT2 はデジタル系用の受信アンテナ,CAM-H はサンプラホーン用のモニタカメラ,CAM-C は DCAM3 システム全体のための制御ユニットでアナログ系用制御基板とデジタル系用制御基板が入っている.
Image : 遊星人
開発の成果と検証試験の結果の詳細については,アナログ系は [5],デジタル系は [6] をそれぞれ参照されたい.また科学観測に重要となるデジタル系カメラの性能検証試験の詳細な結果は [7] にまとめた.この後,DCAM3 は種子島宇宙センターにて無事 Hayabusa2 の探査機本体に取り付けられ,地上での最後の動作試験を終えて,2014年12月03日に小惑星 Ryugu に向けて打ち上げられた.
6. おわりに - 挑戦的な科学観測機器
Hayabusa2 が現在までに得たデータの科学的価値は大きいが,その価値を生み出す鍵となったのは,多くが推進や姿勢制御などの探査機本体に関する工学研究課題への取り組みだった.その中で,デジタル系を組み入れた DCAM3 は,機器のコンセプト自体に多くのリスクを抱えながらも,明確な科学目標に従ってゼロから開発を行って,様々な技術課題を克服して成功を収めた.近年の観測機器の中では数少ない,新しいコンセプトや新しい技術開発を伴う挑戦的な機器だったと言える.その結果として,SCI と共に,世界に全く類を見ない希少な,独創性の高い科学データを得ることが出来た.同時に,理学研究者が膨大な開発作業を担当したことは,観測機器開発を担当できる次世代人材の育成に極めて効果的だった.
惑星探査機の観測機器から得られるデータの価値や希少性は,技術的課題を克服した先に生まれる.これは地上の室内実験やシミュレーションなど,技術を伴う理学研究でも同様である.国内のこれまでの固体惑星探査の多くは,工学技術の挑戦を目的として工学研究者が牽引しており,得られたデータの革新性や科学的価値はそれらの努力によって担保された部分が大きい.一方で,搭載される科学観測機器の方は確実性(低リスク)と低コストを重視する傾向にあり,特に近年はこれが顕著である.その結果,選定される科学観測機器は,挑戦的な要素をできるだけ排除して,過去に宇宙実績のある機器に最低限の改良を施したものや,あるいは国外の有力機器をそのまま導入したものが主力になっている.また,より高いレベルの観測機器を実現するための基礎研究,基礎開発といった活動も下火で,それらと先端の理学研究とのコネクションも十分ではない.このままでは,固体惑星探査における国内の観測機器のレベルが停滞し,世界的に見劣りするものになる.今後,探査技術が成熟していくにつれ,特に月・火星など到達が比較的容易な領域においては,探査機本体の技術課題は相対的に減少し,反対に新しいコンセプトや技術を伴う観測機器,過去に無い高い性能を持つ観測機器など,挑戦的な科学観測機器が価値の高いデータを生む鍵となって,その重要性がますます高まることが予想される.これに対応するためには,観測機器開発に対する腰を据えた取り組みが必要だろう.
国内では伝統的に,科学観測機器の開発の大部分を理学研究者が担ってきた.これには賛否あるが,少なくともこの方式には,観測機器で最も重要な問いである「何のために,何をどのような精度で知りたいのか」の答えが開発者自身に内在する点で大きな利点があり,その情熱が効果的に作用して,前例に無い優れた観測機器を実現する可能性を秘めている.惑星科学研究者コミュニティの中で上記の問題と観測機器開発の重要性をより強く認知して,(研究室内で優れた実験装置を構築することと同じように)理学研究の一部としてその活動が活発になることを願う.それはやがて,日本の惑星探査が世界をリードし,さらには国際協力の中で日本が重要な役割を果たすことにも繋がる.
謝辞
DCAM3 デジタル系の立ち上げと実現は,JAXAの 故・飯島祐一さんの固体惑星科学探査にかける情熱が結実したものである.
DCAM3 デジタル系の開発は,明星電気株式会社の奈良修さん,田中紀子さん,保坂正光さん,高橋宏さん,水本訓子さん,安藤享平さん,谷本和夫さんと技術者の皆様,株式会社日放電子の技術者の皆様,光学系の開発はフォトコーディングの池田優二さんに支えられた.通信系の開発では JAXA の戸田知朗さん,川原康介さんに多くのご支援を頂いた.カメラ性能試験ではJAXA誘導・制御グループの皆様にご協力頂いた.環境試験では JAXA の星野健さん,坂本和敏さんにご協力を頂いた.DCAM3 デジタル系の搭載と運用は多くの Hayabusa2 プロジェクトメンバのご協力で成し得たものである.皆様に深く感謝申し上げたい.
参考文献
[1] Saiki, T. et al., 2017, Space Sci. Rev. 208, 165.
[2] 荒川政彦ほか, 2013, 日本惑星科学会誌 22, 152.
[3] Arakawa, M. et al., 2017, Space Sci. Rev. 208, 187.
[4] 石橋高ほか, 2016, 宇宙科学研究所報告, JAXA-RR-15-005.
[5] Sawada, H. et al., 2017, Space Sci. Rev. 208, 143.
[6] Ogawa, K. et al., 2017, Space Sci. Rev. 208, 125.
[7] Ishibashi, K. et al., 2017, Space Sci. Rev. 208, 213.

Akira IMOTO
Editorial Chief, Executive Director and Board of Director for The Planetary Society of Japan