次世代太陽系探査
はやぶさ2からポストはやぶさ2へ : March 14, 2020. Latest
はやぶさ2の高精度タッチダウンの裏側
原文 - 日本惑星科学会誌「遊・星・人」第28巻(2019)2号 - PDF
はやぶさ2の高精度タッチダウンの裏側
火の鳥「はやぶさ」未来編 その 18
菊地 翔太(ISAS/JAXA), はやぶさ2プロジェクトチーム
※ この遊星人記事は、日本惑星科学会遊星人編集専門委員会より許可を得て掲載しております。
要旨
はやぶさ2は,2019年2月22日に,小惑星リュウグウへのタッチダウンに成功した.小惑星上に密に分布するボルダーを回避するため,はやぶさ2のタッチダウンには,誤差3 mという極めて高い着陸精度が要求された.この高難度の着陸実現に不可欠であった要素について,「リュウグウ近傍の力学的環境」,「着陸地点選定」,「ピンポイントタッチダウン方式」という3つの観点から紹介する.
1. 半径 3 m のたまてばこ
許容誤差 3 m.はやぶさ2に課せられた着陸精度要求である.全幅 6 m のはやぶさ2にとって,「半身」以上のずれは許されない.斯くも酷な要求に,この探査機は見事な形で応える.はやぶさ2は,2019年02月22日の午前07時29分に,小惑星リュウグウへの着陸とサンプル採取のための弾丸発射に成功した.その着陸誤差わずか 1 m.猛禽類の名を冠する探査機に相応しい精確なタッチダウンであった.
タッチダウン直後の上昇中に撮像された画像が図 1(右)である.
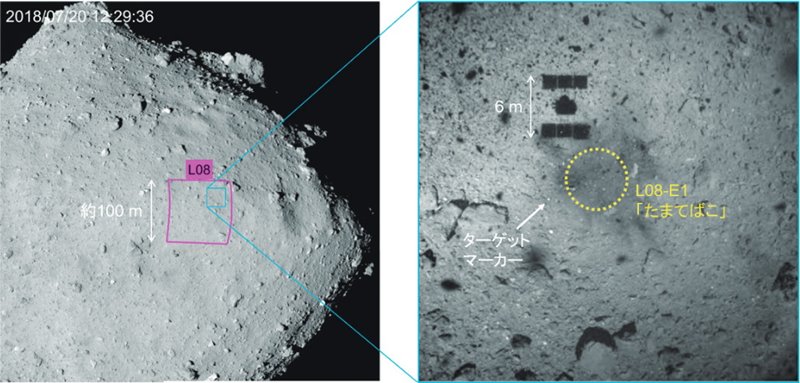
Image Caption :
図 1. タッチダウン直後に撮像された着陸点の高解像度画像 (右)およびタッチダウン前に撮像された着陸点周辺の広域画像(左).右の画像に写る「ターゲットマーカー」については後述.(画像クレジット:JAXA,東京大,高知大,立教大,名古屋大,千葉工大,明治大,会津大,産総研.JAXA 記者会見資料より抜粋・加筆.http://fanfun.jaxa.jp/countdown/hayabusa2/press/index.html [2019年4月20日])
Image : 遊星人
画像中心の円が着陸目標点を表しており,探査機中心が円の内側に収まるように,タッチダウン運用が設計された.画像中央の黒い「しみ」がタッチダウンの跡(スラスタや弾丸,サンプラによる巻き上げと推定されている)であり,ほぼ目標点を中心に広がっていることが見て取れる.脇に影を落とす探査機と同程度のサイズであることから分かる通り,着陸点の半径はわずか 3 m である.したがって,この地点へのタッチダウンには必然的に着陸精度 3 m が要求されたが,はやぶさ2は見事にその関門を突破した.
はやぶさ2の着陸目標点には,L08-E1 というコード名が与えられ,タッチダウン成功後に「たまてばこ」という愛称が授けられた.図 1(左)のリュウグウ広域画像が示す通り,「たまてばこ」はボルダー(岩塊)だらけの小惑星上の極狭い平坦領域である.では,はやぶさ2プロジェクトチームは,いかにしてこの着陸点を選定し,またいかにして高精度のタッチダウンを実現したのだろうか?本稿では,その検討過程と技術的要素の一端をご紹介できれば幸甚である.
過去の連載で津田さん,吉川さんがそれぞれ工学技術とミッション前半の総括をしている.したがって,本稿では,タッチダウン運用にフォーカスして,その成功の裏側を「リュウグウ近傍の力学的環境」,「着陸地点選定」,「ピンポイントタッチダウン方式」の三つの観点から深掘りしたいと思う.筆者は専ら探査機の軌道・姿勢力学およびシステム工学を研究しており,本稿は工学的な目線からの記述が主となるが,タッチダウンの成功は理工一体となった解析・運用の所産であることは論を俟たない.
2. リュウグウ近傍の力学的環境
「遥か 3 億 km の彼方にいる探査機を,未踏の天体に誤差 3 m で着陸させた」と言えば,その妙は直感的には理解できる.一方で,高精度着陸の本質的な難しさは,はやぶさ2が置かれている力学的環境に一因があるように思われる.そこでまず初めに,探査機の運用・降下方法と,その背景にある小惑星周りの特異な力学系について述べたいと思う.
2 - 1. はやぶさ2はリュウグウの重力圏外?
地球周りの人工衛星や天体にランデブーする深宇宙探査機のほぼ全ては,対象天体を周回しながらミッションを遂行する.対象天体の重力を,周回による遠心力で打ち消す1),という算段である.一方で,この例から漏れる探査機が,はやぶさ初号機とはやぶさ2である.はやぶさシリーズは,小惑星重力に抗した定期的なスラスタ噴射により,高度を維持している.この手法は「ホバリング」と呼ばれ,探査機を留める点は「ホームポジション」と呼ばれる.はやぶさ2のホームポジションは,サブアースライン(小惑星と地球を結ぶ線)上で 20 km の高度に位置する.
1). 天体中心の回転座標系で運動を観測することによる見かけ上の力であり,力学系の研究者の間でも現象の説明の仕方は好みが分かれる.
はやぶさ2がホバリング運用を採用する理由には,小惑星周り特有の力学的環境が関係している.小惑星は重力が微小であるため,通常は無視できる太陽輻射圧などが,相対的に大きな外乱として作用する.加えて,小惑星は一般に歪な形状をしているので,その近傍で重力が不均一に作用する.ゆえに,小惑星近傍では,探査機の運動が強い摂動を受けやすい.
十分な速度さえ与えれば,楕円軌道(ケプラー軌道)を描く惑星近傍の環境とは異なり,小惑星周りの強摂動環境では限定的な幾何条件でしか安定的な周期軌道は得られない.良く知られた例が,OSIRIS-REx のターミネータ軌道であり,軌道面が小惑星の昼夜境界面に含まれるような極軌道である [1].一方で,はやぶさ2では,探査機の機器配置上,ターミネータ軌道は運用に不向きである.したがって,はやぶさ2では,多少の燃料を犠牲にして,ホバリング運用を採用している.勿論,ホバリング運用で燃料収支が成立するのは,微小重力環境であるからこそである.
このリュウグウ近傍の特異な環境を視覚的に図示したものが図 2 である.
Image Caption :
図 2. リュウグウ近傍におけるエネルギー場.中心の涙滴型の太い曲線は,小惑星重力が支配的となる領域の境界(ロッシュ・ローブ)を表す.HP:ホームポジション
Image : 遊星人
この等高線図はリュウグウ近傍でのエネルギー場の例である2) [1].詳細は割愛するが,中心付近の涙滴状の太曲線が,実質的なリュウグウの重力圏に相当する.図に示されている通り,ホームポジションは,この重力圏の外側に位置している.古典的な三体問題で定義される重力圏は,これより広範であるが,太陽輻射圧を考慮すると,実効的な重力圏はこのように狭くなる.すなわち,小惑星近傍に居ながらにして,小惑星重力には完全にトラップされていない.太陽輻射圧に吹かれれば飛び兼ねないという,センシティブな力学的環境に,はやぶさ2は身を置いているのである.
2). より正確には,太陽輻射圧を考慮した,探査機-小惑星-太陽の三体問題における,ヤコビ積分と呼ばれる保存量の等高線図である.ゼロ速度曲線とも呼ばれ,ある位置に物体を静止した状態で置いたときに,その後物体がどのように運動し得るかの示唆を与える.
2 - 2. 光の速度,亀の速度
では,具体的にリュウグウ近傍に滞在するはやぶさ2が受ける力はいかなる大きさであろうか.図 3 に示すのが,小惑星中心からの距離ごとに探査機に作用する種々の加速度の大きさである.
Image Caption :
図 3. リュウグウ近傍ではやぶさ2に作用する力.高次重力は,緯経度ゼロの線上で,形状モデルから数値的に計算した.
Image : 遊星人
例えば,ホームポジションでは,小惑星重力と太陽輻射圧の大きさが同程度である.また,小惑星に近づくと急速に高次重力の効果が発達し,逆に小惑星から遠ざかると太陽重力の影響が顕著となる.小惑星表面に到達するタッチダウン運用から,高度 100 km 強に退避する合運用に至るまで,幅広いレンジで高精度の運用を行うためには,種々の加速度を正確に推定・モデル化することが極めて重要なのである.
タッチダウン運用時には,ホバリング運用から直接降下に移行する.したがって,ホームポジションからサブアースラインに沿って,一定の速度で真直に降下する軌道となる(図 4).
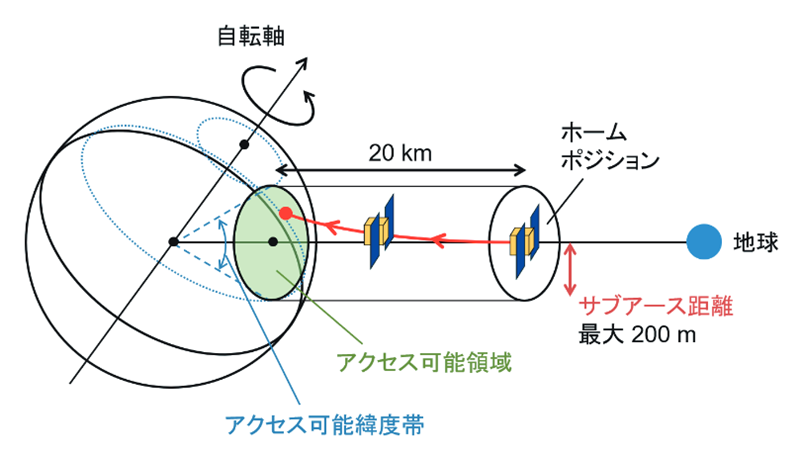
Image Caption :
図 4. はやぶさ2の降下軌道の概念図.
Image : 遊星人
太陽輻射圧や高次重力の効果ゆえに,「真直に降下する」というのが存外困難であることは先述の通りである.はやぶさ2では,誘導精度を担保するために,軌道決定と軌道制御のサイクルを反復しつつ,丸一日かけて降下する.火星着陸時の高速リエントリーとは様相を異にして,はやぶさ2の着陸は,龍宮城に向かう亀宜しい低速降下である3).
3). はやぶさ2の降下運用時の降下速度は,高度 5 ~ 20 km の領域では約 40 cm/s,高度 5 km 以下の領域では約 10 cm/s である.一方で,亀の陸上走行速度の2014年07月時点でのギネス記録は,28 cm/s である.亀の水中での移動速度は,より速いのではないかと推察される.出典:http://www.guinnessworldrecords.com/world-records/77951-fastest-tortoise [2019年5月1日].
もう一点,高精度着陸の障壁となるのが,地球と小惑星の距離である.タッチダウン運用が行われた2019年02月22日において,地球-小惑星間の距離は約 3.4 億 km(2.28 天文単位)であり,光の速度をもってして片道 20 分弱かかる距離である.探査機状態の情報を地上で受け取ってから,コマンドを送信し終わるまでに往復 40 分要する.したがって,比較的高度が高い領域では,探査機の現在・未来の軌道を精度良く予測しながら後の制御量を計算しており,高度が低い領域では,探査機は完全自律で位置・姿勢を制御するようプログラムされている(第 4 章で後述).このような表に顕れ難い工学的要素が,着陸の高精度化に多大な貢献をしているのである.
3. 着陸地点選定
3 - 1. 安全性の定量化
はやぶさ2のタッチダウン成功において,重要な役割を果たしたのは,Landing Site Selection(LSS)と呼ばれる着陸地点選定作業である.LSS には大別して理学的な側面と工学的な側面とがある.前者が答えるべき問いは,「小惑星上のどの地点に着陸すれば,科学的価値の高いサンプルを採取できるか?」である.生憎,筆者は物質科学的な観点からリュウグウの性質を適切かつ魅力的に語るに足る知識を具えていないが,この点は過去の橘さんの連載などを参照されたい [2].他方,工学的な LSS 解析では,「小惑星上のどの地点に着陸すれば,安全かつ確実なサンプル採取ができるか?」という課題に取り組む.
安全にタッチダウンするためには,無論着陸点に大きなボルダーがあってはならないが,それ以外にも満たすべき工学的要求がいくつかある.第一にサブアースラインからのオフセット距離である.先に述べた通り,基本的に探査機はサブアースラインに沿って降下する.そのため,サブアースラインからオフセットした位置に降下する場合,軌道を「曲げる」必要があり,探査機の誘導精度が劣化する.高精度の安全な降下誘導を実現するために,サブアース距離の上限は 200 m と設定されている.この要求により,図 4(↑) に示す通り,アクセス可能な緯度帯が制約される.リュウグウの自転軸は,黄道面に対して垂直に近いため,アクセス可能な緯度帯の季節依存性は小さく,概ね緯度が ± 30 deg 以内の地点がタッチダウン可能なエリアである.この他にも,発電を担保するための太陽角制約や,サンプル採取を担保するための傾斜角制約を設けることで,着陸可能な地点を絞り込んだ.加えて,着陸可能な地点に対して,上記の幾何量の重み付き和を「安全指数」として定義することで,図 5 のように地点間の相対評価を行った [3].
Image Caption :
図 5. 安全指数マップ.安全指数が小さい青色領域が安全な領域を表す.グレーの領域は,タッチダウン不可のエリア.候補点のサイズは約 100 m 四方.
Image : 遊星人
この初期段階の LSS は,リュウグウの形状モデルに基づいて定量的に行われた.結果,画像による目視評価と合わせて,図 5 に示す七つの候補点が初期段階で選定された.候補点のコード名の “L” と “M” はそれぞれ低・中緯度帯の候補点であることを表す.赤道リッジ上の低緯度帯の候補点の方が,中緯度帯の候補点より安全指数が良いが,これは主にサブアース距離が小さく,アクセスしやすいためである.
さらに,これらの候補点に対して,理学的な評価とボルダー密度の評価を詳細に行うことで,最終的には,L08 点がメインの着陸候補点として選定された(表 1)[4].この時点で,同時に小型着陸機の MASCOT と MINERVA-II1 の着陸候補点も合わせて選定された.小惑星到着から着陸地点選定までに要した期間はわずか 50 日程度であり,このスムーズな作業は LSS 訓練の賜物である [5].
表1: LSSの推移
| 項目 | 着陸候補点 | サイズ |
| 中間着陸候補点 | L05, L07, L08, L12
M01, M03, M04 |
100 m 四方 |
| 最終着陸候補点 | L08 (primary)
L07, M04 (backup) |
100 m 四方 |
| TM 投下目標点 | L08-B | 直径 20 m |
| TD 目標点 | L08-E1 | 直径 6 m |
* TM:ターゲットマーカー,TD:タッチダウン
3 - 2. リュウグウの牙の間隙
選定された L08 点を目標として,タッチダウンのリハーサル運用が行われた.運用自体は途中でアボートする結果に終わったものの,従来と比して高解像度の着陸点付近の画像が取得された.当初の設計では,探査機の誘導精度は 50 m と見込まれていたため,LSS では約 100 m 四方の着陸点を選定した.一方で,ここまでの運用・解析結果から,比較的安全性の高い L08 点であっても,領域内に大きなボルダーが多く分布していることが判明した.したがって,着陸円の範囲を狭め,同時に探査機の着陸精度を向上する策を講じることが必須であった.この状況を打開したのが,ピンポイントタッチダウン戦略と着陸点の詳細地形分析である.前者はターゲットマーカーと呼ばれる人工物を投下し,それを目印にして精密に位置を制御する手法である.その詳説は次章に譲るとして,本節では地形の詳細分析について述べたいと思う.
図 6 に示しているのは,タッチダウン運用に先行して行われた,2018年10月25日のターゲットマーカー投下運用(TD1-R3)でリリースされたマーカー周辺の画像である.L08 領域内の直径 20 m の L08-B 点を目標として,ターゲットマーカーが投下された(表 1).目標点中心に対する投下誤差は 15 m であり,当初の誘導精度 50 m と比較すると十分高い精度であったが,L08-B 円内からやや外れる結果となった.それ以上に厄介であったのが,投下時に得られた高解像度画像を含めた詳細画像解析の結果である.安全と思われた L08-B 内にも,探査機に危険を及ぼすサイズのボルダーが点在していることが判明した.この状況は,津田プロマネをもってして,「リュウグウが牙をむいてきた」と言わしめた.
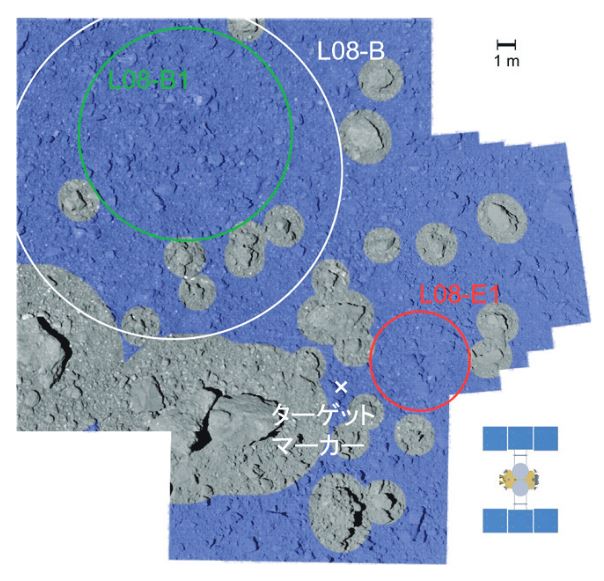
Image Caption :
図 6. 着陸候補点周辺の安全エリア.青色で塗りつぶされた領域が,安全なエリアを示す.
Image : 遊星人
プロジェクトチームは,この事態に対処するべく,地形の詳細解析を行った.図 6 に示されている青色の領域は,探査機に危険を及ぼすボルダーがない安全エリアである.ステレオ視や影解析によるボルダー高さの推定を踏まえて,太陽電池パドルやスラスタに衝突し得るボルダーが同定された.結果として残ったのが,L08-B1 という広くてマーカーから遠いエリアと,L08-E1 という狭くてマーカーから近いエリア.究極の二択である.
次章で述べる通り,タッチダウン時には光学カメラでマーカーをトラッキングするため,離れた点に着陸するためには,視野確保のために高度を上げる必要がある.そして,高高度からのタッチダウンは,着陸精度を低下させる.その結果,L08-B1 点より狭い L08-E1 点の方が,むしろ正味の安全マージンが大きいという事実が見出された.斯くして,半径 3 m の L08-E1 点,通称「たまてばこ」が最終的な着陸点として選ばれたのである.リュウグウの牙の間隙が見えてきた.
4. ピンポイントタッチダウン方式
4 - 1. 序盤から奥の手
さて,既に述べている通り,はやぶさ2の着陸には,再帰性反射材を巻いたターゲットマーカーを用いて,ピンポイントタッチダウンという戦略が適用された.この方式は元々,インパクター運用によって生成された人工クレータに高精度で着陸するための,言わば奥の手である.対して,当初,第一回目の着陸は,ノーマルタッチダウン方式(はやぶさ方式)で行われる予定であった.いずれもターゲットマーカーを用いる手法である.では両者は何が違うのか?
図 7 を参照されたい.
Image Caption :
図 7. ノーマルタッチダウン(左)とピンポイントタッチダウン(右).(TM: ターゲットマーカー).JAXA 記者会見資料より抜粋・加筆.http://fanfun.jaxa.jp/countdown/hayabusa2/press/index.html [2019年4月20日])
Image : 遊星人
ノーマルタッチダウンでは,着陸の際にターゲットマーカーを投下し,探査機はそれを常にカメラでトラックし続ける.地面に静止したターゲットマーカーを補足しながら降下すれば,対地速度をゼロにした状態で着陸することができる[相対速度の制御].すなわち,この方式ではマーカーが落ちた点にタッチダウンすることになるため,仮にマーカーがボルダーに囲まれた地点に静止すると,着陸時に探査機に危険が及ぶこととなる.
一方のピンポイントタッチダウン方式では,事前に別途マーカーを投下して,マーカー周辺の地形を解析し,安全な着陸点を探索する.タッチダウン本番時に再度降下して,ターゲットマーカーを補足しながら,あらかじめプログラムされた通りに移動する[相対位置・速度の制御].これにより,マーカーから離れた位置に高精度で着陸することが可能となる.
高精度着陸ができるのなら,端からピンポイントタッチダウンをすれば良いのではないか,と思われるかもしれない.しかし,この着陸方式の実現には二つの大きな課題がある.第一に,タッチダウンの際に,事前に落としたマーカーを確実に補足せねばならない.想像して頂きたい.東京ドーム 60 個分程の広大な小惑星表面に横たわる直径わずか 10 cm の球体を見つけに行くのである.マーカー捕捉のための降下そのものに相応の精度が要求される.第二に,ピンポイントタッチダウンで重要なのが,マーカー周辺の詳細な地形を把握することである.探査機のターゲットマーカー相対の移動量は,事前の情報に依拠するため,的確な指令を与えるためには,的確な地形情報が必要となる.
これらの課題解決に不可欠なのが,第 2 章で述べた探査機ダイナミクスの理解であり,また第 3 章に記した綿密な LSS 解析なのである.こうして,リュウグウの苛烈な環境に対応するために,はやぶさ2は奥の手を序盤から惜しみなく実践投入した.
4 - 2. センチメートルの攻防
ピンポイントタッチダウンで要求される着陸精度が 3 m であるため,数十 cm の誤差が探査機の喪失に繋がり得るという状況である.単なる想像の域を脱しないが,恐らく,これまでの深宇宙無人着陸探査ミッションで,cm オーダーの細緻な誤差評価を要したケースは無かったのではなかろうか.例えば,火星の着陸機の着陸精度は通常 km オーダーである.重力や大気の条件が決定的に異なるので,単純な絶対スケールの比較は意味を為さないが,はやぶさ2がこれまでとは質の異なる着陸設計に迫られたことに相違ない.
まず,気にしなければならなかったのが,探査機の機器配置である.一例を挙げると,探査機は光学カメラでターゲットマーカーの方向を認識するが,カメラは探査機中心に取り付けられているわけではない.つまり,マーカーを視野の中心に補足するような制御がなされる時,探査機中心自体はマーカーから数十 cm オフセットすることになる.こういった具合で,光学カメラや,レーザー測距系,サンプラーホーン,スラスタといった機器の配置を,着陸シーケンス設計で丁寧に考慮することとなった.無論,小惑星到着前の着陸設計では想定していなかったことである.
また,数値シミュレーションにより,タッチダウン時に太陽電池パドルや探査機下面のスラスタが,ボルダーに対して何 cm のクリアランスを有し得るかを評価した.誤差解析により,ボルダーへの接触確率が極めて低いことが確認されたが,慎重を期するため,着陸時に探査機姿勢を敢えて 10 deg 程傾けるという案が採用された.少しでも危険なボルダーに対する余裕を確保するためである.その効果は 30 cm に満たないが,探査機の安全性を最大限高めるこの種の工夫が随所に散りばめられた.
上述の詳細なシミュレーションを行っている様子が図 8 である.
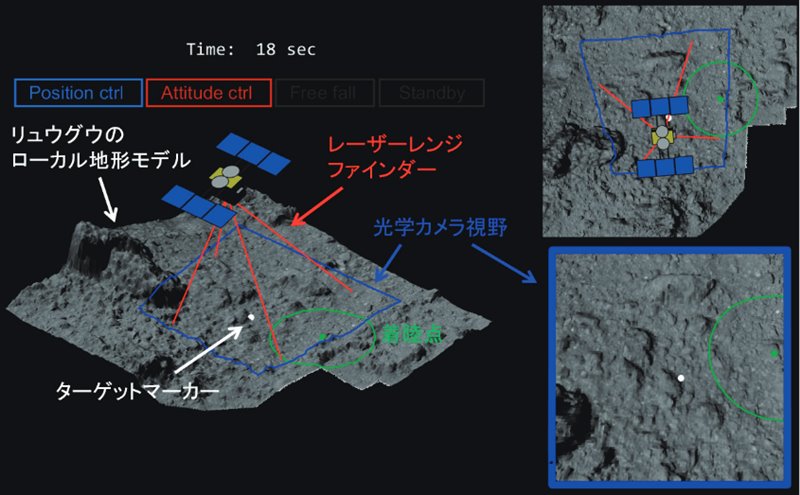
Image Caption :
図 8. タッチダウン最終シーケンスのシミュレーション.
Image : 遊星人
形状モデルチームから供された高解像度のローカルな地形モデル上で,探査機の運動が模擬されている.斯くして cm スケールの検証を重ねることで,プロジェクトチームは,虎の穴が如き半径 3 m の着陸点に対するタッチダウン成立性に自信を深め,GO の判断を下したのである.
5. 結果とその後
2019年02月21日から22日にかけて,はやぶさ2は,本稿で紹介した高精度の降下,ターゲットマーカー捕捉,ピンポイントタッチダウンの自律制御をこなし,予定された目標点に見事着陸した.図 9 がフライトデータから復元した,タッチダウン時の探査機位置・姿勢を示している.
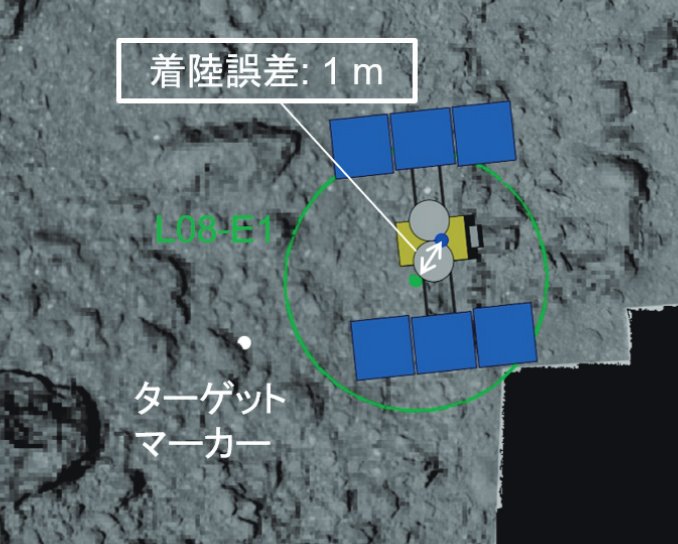
Image Caption :
図 9. タッチダウン位置・姿勢の復元結果.
Image : 遊星人
目標点からの誤差はわずか 1 m と推定され,緻密に計画された着陸運用が結実した瞬間である.また,着陸後すぐに,弾丸が発射されたことを強く示唆するデータが得られ,その成果に管制室が沸いた.
本稿執筆時点で,はやぶさ2はインパクター運用とクレータ生成にも成功しており,2 回目のタッチダウンに向けて,粛々と準備を進めているところである.1 回目にタッチダウンした「たまてばこ」同様に,更なる「開けてびっくり」の成果に期待したい.
最後に私感を記することをご容赦頂きたい.はやぶさ2の着陸成功そのものも然ることながら,はやぶさ初号機に携わっていたメンバーが,「初号機が成し得なかった弾丸発射という借りを返せた」と語っていたことが非常に印象深い.はやぶさ初号機,はやぶさ2,あるいはその先へと,絶えることなく受け継がれる技術や意志こそ,はやぶさが「火の鳥」たる所以なのではなかろうか.
参考文献
[1] Scheeres, D. J., 2012, Orbital Motion in Strongly Perturbed Environments (Chichester: Springer)
[2] 橘省吾ほか,2013, 遊星人22, 261.
[3] Yamaguchi, T. et al., 2018, Acta Astronautica 151, 217.
[4] Watanabe, S. et al., 2019, Science 364, 268.
[5] 石原吉明ほか,2017,遊星人 26, 139.

Akira IMOTO
Editorial Chief, Executive Director and Board of Director for The Planetary Society of Japan