次世代太陽系探査
はやぶさ2からポストはやぶさ2へ : January 30, 2020. Latest
「 はやぶさ2」ミッション前半を終えて
火の鳥「はやぶさ」未来編 その 16
吉川真(宇宙航空研究開発機構)はやぶさ2プロジェクトチーム
※ この遊星人記事は、日本惑星科学会遊星人編集専門委員会より許可を得て掲載しております。
要旨
2018年11月,「はやぶさ2」のミッションは,その前半が終了した.2018年06月27日に目的地である小惑星リュウグウに到着し,リモートセンシングによる観測は一通り終了した.また,小型ローバ MINERVA-II1 と 小型着陸機 MASCOT をリュウグウ表面に降ろすことにも成功し,これらからのデータの取得もできた.ただし,サンプルを採取するためのタッチダウンは,2019年に延期となった.これは,リュウグウ表面の至る所に岩塊が存在しており,安全に着陸できる十分に広い場所が見つからなかったため,探査機のより高精度なナビゲーションが必要になったためである.ここでは,「はやぶさ2」の誕生の経緯からミッション前半までをまとめてみることにする.
1. はじめに
2018年11月になると,怒濤のように続いていた「はやぶさ2」の運用はその余韻は残っているものの,少し落ち着きが戻ってきた.あたかも非常に暑かった2018年の夏が終わって,秋の涼しさ・静けさにほっとしたかのように.
「はやぶさ2」は,2014年12月03日に種子島宇宙センターから打ち上げられてから三年半(厳密には 1302 日)という時間を経て,2018年06月27日に小惑星(162173)Ryugu(以下ではリュウグウと表記)に到着した.後述するように,初めて至近距離で見たリュウグウは我々を驚かせる形状だった.その後,リモートセンシング観測を行いつつ,合計 9 回の降下運用を行い,結果として MINERVA-II1 の分離,MASCOT の分離,そしてターゲットマーカの分離に成功した.しかし,2018年10月に予定していたタッチダウンは,小惑星表面にあまりにもボルダー(岩塊)が多いので,安全を期して2019年に延期されることになった.
本稿を書いている2018年11月の時点で,「はやぶさ2」は,ミッションの前半が終了したと言ってよいであろう.本稿は,「火の鳥「はやぶさ」未来編」シリーズの 16 回目となる.この機に,ここまでの「はやぶさ2」ミッションについて振り返ってみることにする.
2. 産みの苦しみ
そもそも「はやぶさ2」が誕生することになったのは,2005年末から2006年にかけて「はやぶさ」が大変なトラブルに遭遇したことによる.「はやぶさ」は2005年11月26日に小惑星イトカワに 2 回目のタッチダウンを行ったが,離陸直後に燃料漏れが発生した.そして,通信も途絶えるという状況に陥ったのである.通信の方は約 7 週間後に復活したが,その後,いろいろ調べてみると,2 回目のタッチダウンのときに,サンプルを採取するときに発射されるはずだったプロジェクタイルが発射されていない可能性が高いということが判明した.プロジェクタイルが発射されていないとサンプルが採れていないかもしれないし,探査機そのものも燃料漏れを起こしており,本当に地球に帰還することも不可能かもしれない.
このような状況のもとで,2006年,「はやぶさ」の再挑戦ということで「はやぶさ2」が提案されたのである.藤原顕先生を中心に検討が開始されたが,その後は筆者が取りまとめを行うことになった.最初に提案された「はやぶさ2」は,探査機としてもミッションとしてもほとんど「はやぶさ」と同じものになっていた.ただし,探査対象天体としてはすでに 1999 JU3 が選ばれていた.今ではリュウグウと呼ばれることになった C 型の微小な地球接近天体(NEO:Near Earth Object)である.つまり,探査対象天体としては,「はやぶさ2」の最初の提案からリュウグウが選ばれていたわけである.
しかし,「はやぶさ2」の提案はなかなか了承されなかった.もともと「はやぶさ」の再挑戦という位置づけだったので,「はやぶさ」で明らかになった問題点を改良した探査機での再挑戦ということだったのだが,これでは新規性がない,という批判があった.それならば,ということで,小惑星への衝突実験も行おうということになり,2 機の探査機を相乗りで同時に打ち上げることを提案した(図 1).片方の探査機(「はやぶさ2」に相当)が先に小惑星に到着して探査をしておいて,後からもう 1 機がその小惑星に衝突するというミッションである.このミッションを提案すると,今度は,コストが高すぎると言われた.ロケットは共有としても,探査機が 2 機になるので確かにコストは高くなる.

Image Caption :
図 1. 「 はやぶさ2」の初期の頃の提案.「はやぶさ2」に相当する探査機(左)が先に小惑星に到着して探査を行い,後から衝突機(右)と呼ばれる探査機が到着してそのまま小惑星に衝突するというミッションである.この衝突機が実際の「はやぶさ2」の SCI の元のアイディアである.なお,この時点での検討では,「はやぶさ2」に相当する探査機の方のハイゲインアンテナは一つのみとなっている.(イラスト:池下章裕)
それで 2 機の探査機を使うことは諦めて,一つの探査機でも衝突実験ができるように工夫をしたわけである.これが「はやぶさ2」搭載の衝突装置である.衝突実験の規模は小さくなってしまったが,「はやぶさ」には無かったミッションを行うことができる.それでも,やはりコストを削減しなければダメだというので,今度は,ヨーロッパやアメリカに協力を依頼しようということになり,「はやぶさ」のプロジェクトマネージャの川口淳一郎先生と一緒にヨーロッパで交渉したりアメリカで交渉したりした.しかし,協力を取り付けることはできなかった.
「はやぶさ2」の検討と平行して,ヨーロッパの研究者とは,当初「はやぶさ Mk 2」(はやぶさマーク・ツー)として,そして途中からは MarcoPolo(マルコポーロ)と改名して(図 2),日欧共同で小惑星サンプルリターンミッションを行うことを議論していた.こちらは,「はやぶさ2」の次により進んだ小惑星サンプルリターンを行うというものであったが,残念ながらヨーロッパのミッションとして選ばれなかった.MarcoPolo が選ばれなかったこともあるので,ヨーロッパにはさらに「はやぶさ2」への協力を打診したが,それも了解されることはなかった.

Image Caption :
図 2. マルコポーロミッションの想像図.大型の探査機で長い足の先にサンプルを撮る装置が付いている.表面には,着陸機(右)と小型ローバ(左)がある.この着陸機の議論が「はやぶさ2」の MASCOT に繋がった.なお,右下の白い物体はターゲットマーカである.(イラスト:池下章裕)
このように,「はやぶさ2」のミッション提案はまさに八方ふさがりの状況のまま,2010年06月の「はやぶさ」の地球帰還を迎えることになったのである.その「はやぶさ」の地球帰還は,国内そして国外で大きな注目を集めることになり,そのために「はやぶさ2」の予算が認められることになった.2011年に「はやぶさ2」はようやくプロジェクトとなってスタートすることになった.
このように約 5 年間に渡って紆余曲折が続いたわけであるが,結果的に「はやぶさ2」にとってメリットになったこともある.それは,認められるまでに時間がかかったことにより,最初の提案にいろいろと新規なものを加えることができたことである.その一つがすでに述べた衝突装置であり,もう一つがドイツ・フランスの製作による MASCOT と呼ばれる小型着陸機である.これは,MarcoPolo のミッションでヨーロッパ側が着陸機を検討していたことから「はやぶさ2」に小型着陸機を載せることになっていったのである.紆余曲折も無駄ではなかった.
3. リュウグウ到着まで
2011年にプロジェクト化した後,急ピッチで探査機の製作が行われ,2014年12月03日の打ち上げに至った.ここでは探査機の製作過程については省略するが,プロジェクト化からわずか 3 年ちょっとで打ち上げに至ったことは,この規模の探査機としては異例に短いということのみ述べておく.(ミッション初期の文献:[1-3];「はやぶさ2」の機器についての文献:[4])
打ち上げ後,最初の 3 日間ほどでクリティカルな運用は終了し,その後,初期機能確認のための運用がなされ,2015年03月からは通常の惑星間クルージング運用が始まった.そして,打ち上げからちょうど 1 年後の2015年12月03日に地球に接近し,スイングバイによる軌道制御を行った.その後は,探査機は太陽を 2 周回ほどすることになるがその間 3 回の長期イオンエンジン運転を行った.2018年06月初めにはリュウグウまで 3000 km ほどのところまで接近し,そこからは光学電波複合航法によってリュウグウへの最終接近をした.そして,06月27日がリュウグウ到着ということになったのである.
約三年半にわたるクルージングについてもここでは詳細は省略するが,このクルージングの期間においていろいろな技術的実証を行った.項目のみ挙げると次のようになる.
- ・イオンエンジンによる長期間の軌道制御(のべ一万八千時間余りの運転)
- ・地球スイングバイによる正確な軌道変更
- ・太陽光圧を積極的に利用した姿勢制御(ソーラーセイルモード)
- ・地上局が変わっても途絶えない通信手法(アップリンクトランスファー)
- ・DDOR による高精度軌道決定(DDOR=Delta Differential One-way Range)
- ・Ka 帯による深宇宙通信
- ・光学電波複合航法による探査機・小惑星同時軌道推定
以上の技術は,「はやぶさ2」のための技術というものではなく,今後の太陽系天体探査ミッションに役立つものである.
4. やはり想定外
2018年06月半ば,だんだんとリュウグウが大きく見えるようになり,その形があかたも“そろばんの珠”のような形状であることが分かってきた(図 3).
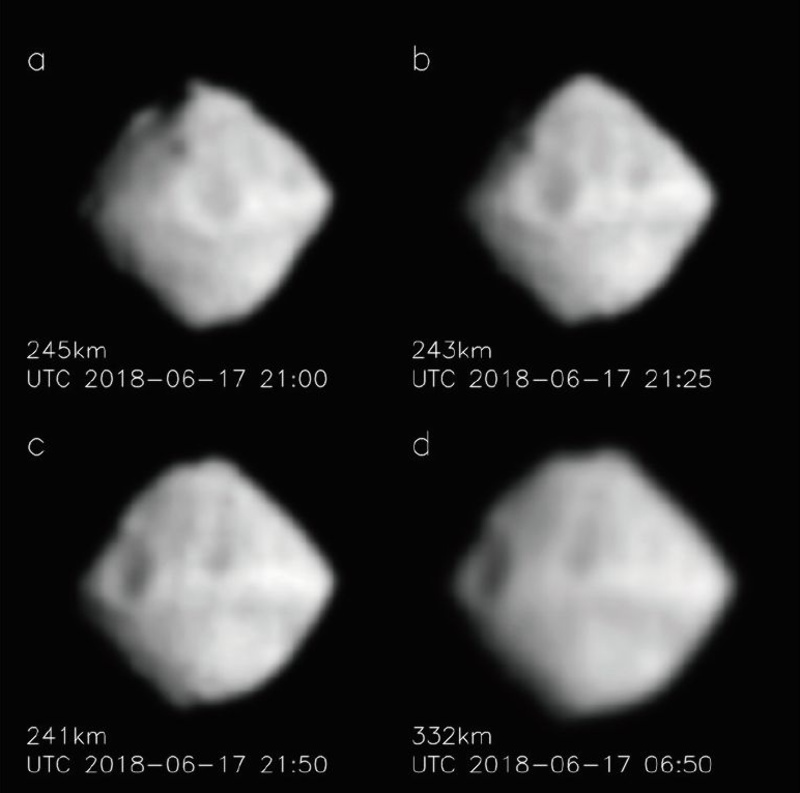
Image Caption :
図 3. 330~240 km の距離から撮影されたリュウグウ.望遠の光学航法カメラ(ONC-T)によって撮影された.画像は,拡大補間と明暗強調(明るさを 2 乗)を行ってある.2018年06月17日の15時(日本時間)頃と,06月18日の06時頃(日本時間)の撮影.自転の順番に a, b, c, d となるように並べてある.(画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
これは,最初の驚きであった.まさに誰も想定していなかった形状である.このような形を英語でコマ(独楽)型(top shape)と呼ぶが,このような形の小惑星があること自体はすでに知られていた.米国の OSIRIS-REx ミッションの探査天体である小惑星 Bennu もレーダーによる観測でコマ型の形状であることが分かっていた(2018年11月の時点で,Bennu の撮影がなされており,確かにコマ型であることが確認された).Bennu 以外にも,レーダーによる観測でいくつかの小惑星についてはコマ型をしていることがわかっていた.ただし,これらコマ型の小惑星はいずれも自転周期が短くて,2 時間から 3 時間,周期の長い Bennu でも 4 時間程度である.リュウグウの自転周期は 7.6 時間であるから,発見されているコマ型小惑星の自転周期より 2 倍から 4 倍近く長い.したがって,リュウグウについては,誰もコマ型を想定していなかったのである.
リュウグウ表面がより詳しく見えてくると,二つ目の想定外に直面した.それは,リュウグウの全面がボルダー(岩塊)で覆われていたということである(図 4a, b).
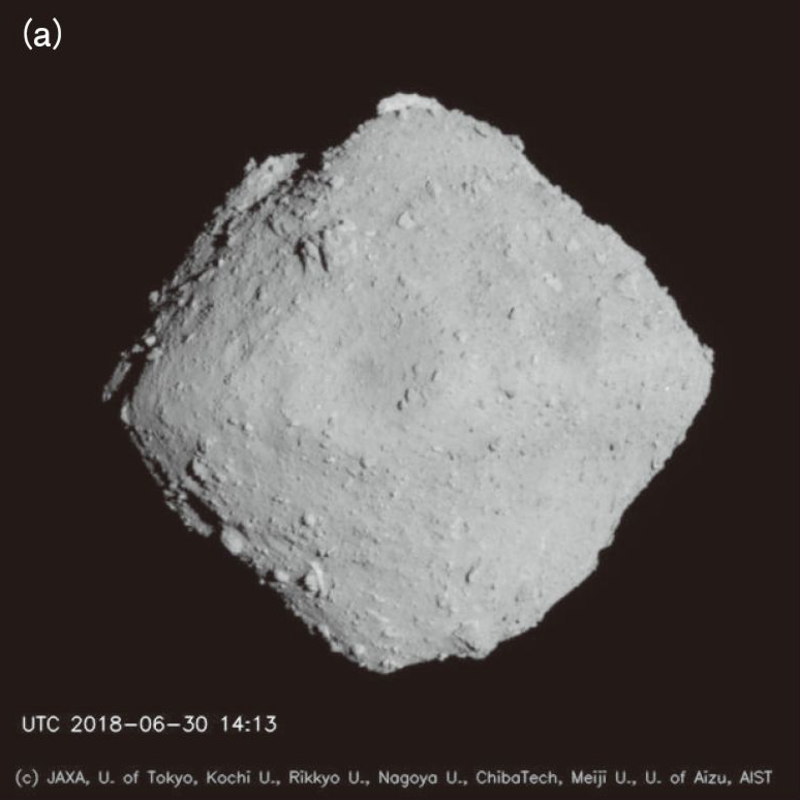
Image Caption :
図 4. (a)ホームポジション(高度 20 km)から ONC-T によって撮影されたリュウグウ.2018年06月30日 23:13(日本時間)頃の撮影.中央付近に直径が 300 m ほどのクレーターが見られる.(画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
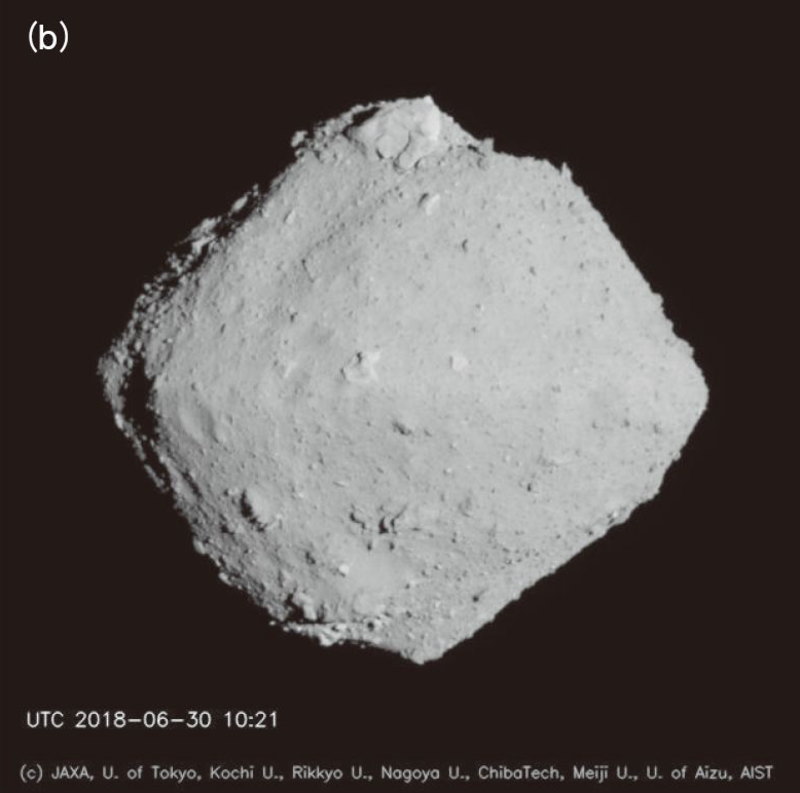
Image Caption :
図 4. (b)ホームポジション(高度 20 km)から ONC-T によって撮影されたリュウグウ.2018年06月30日 19:21(日本時間)頃の撮影.上側の極(リュウグウの南極)付近に 150 m ほどのボルダーが見られる.(画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
ボルダーで覆われているだろうということは想定していたが,どこかにボルダーがない領域もあるだろうというのが事前の想定だった.例えば,「はやぶさ」が訪れたイトカワもボルダーで覆われていて当時は全く想定外の状況に驚いたわけだが,MUSES-C Regio(通称「ミューゼスの海」)という幅 50 m 程度の平らな領域があった.しかし,リュウグウにはボルダーがない広い領域が全く見つからないのである.
さらにリュウグウには大きさが 150 m もあるボルダーがある.また,直径が 300 m ほどのクレーターもある.これらの特徴は,形がコマ型であることも合わせて,リュウグウの形成過程やその後の進化を説明する手がかりになるであろう.また,ここでは詳しくは述べないが,リュウグウ表面については,到着後に「はやぶさ2」に搭載されているレーザ高度計(LIDAR)で詳細な地形を調べたり,近赤外分光計(NIRS3)で近赤外線におけるスペクトルを調べたり,中間赤外カメラ(TIR)で温度変化を調べたりしている.光学航法カメラでも単に表面の写真を撮るだけでなく,フィルタを用いて波長帯ごとの観測も行っている.これらのデータを総合することで,リュウグウの素性が明らかにされるはずである.
それにしても,ボルダーで覆われているということで,タッチダウンは困難であることがはっきりした.
5. 小惑星近傍ミッションの進捗
2018年06月27日にリュウグウに到着してからしばらくの間は,探査機はホームポジションと呼ばれる地点に滞在していた.ホームポジションはリュウグウと地球を結ぶ線上でリュウグウから約 20 km のところである.ここに“ホバリング”していたわけである.探査機はリュウグウを周回はしない.これは,「はやぶさ」のときと同様である.小惑星の引力が小さいので,周回させるよりはホバリングをする方が運用においては適している.リュウグウの方が自転してくれるので,ホバリングしていてもリュウグウ全体を観測できる.
その後,このホームポジションから離れる運用を何度も行うことになる.分かりやすいように,探査機がどの領域を移動するかによって名称を付けることにした.図 5 に示してある BOX-A,BOX-B,BOX-C である.BOX-A 運用がホームポジションでの運用に対応する.BOX-B 運用は,リュウグウからの距離は約 20 km のままであるが,ホームポジションから東西南北方向に移動する運用である.そして,BOX-C 運用がホームポジションから高度を下げる運用になる.
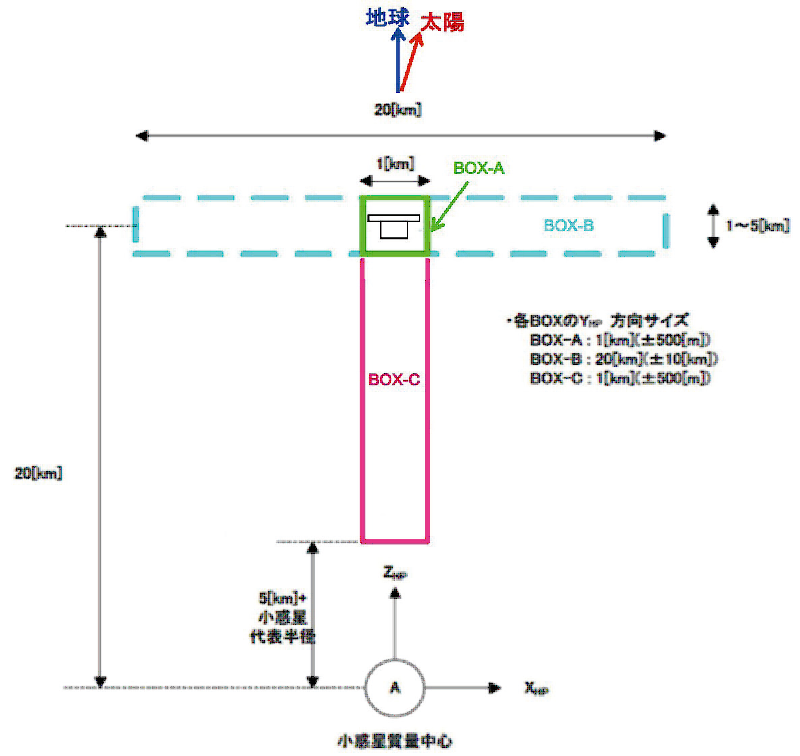
Image Caption :
図 5. 運用における BOX の定義.(画像クレジット:JAXA)
近傍での主要な運用をまとめたものが表 1 である.2018年11月初めまでに,合計 9 回の降下運用と 1 回の BOX-B 運用を行った.それぞれの運用を説明すると長くなってしまうので概略のみ説明する.
表1:「 はやぶさ2」の2018年の主要な運用
| 月日 | 運用 |
| 01月10日 | 第3期イオンエンジン運転開始 |
| 06月03日 | イオンエンジン運転終了 |
| 06月03日 | 小惑星接近誘導開始(距離 3100 km) |
| 06月27日 | 小惑星到着(高度 20 km) |
| 07月17日~25日 | BOX-C 運用(07月20日,最低高度約 6 km) |
| 07月31日~08月02日 | 中高度降下運用(08月01日,最低高度約 5 km) |
| 08月05日~10日 | 重力計測運用(08月07日,最低高度 851 m) |
| 08月18日~09月07日 | BOX-B 運用(高度約 20 km でのツアー観測) |
| 09月10日~12日 | タッチダウン 1 リハーサル 1(TD1-R1)(09月12日,最低高度約 600 m) |
| 09月19日~21日 | MINERVA-Ⅱ 1 分離運用(09月21日,最低高度約 55 m) |
| 09月30日~10月04日 | MASCOT 分離運用(10月03日,最低高度約 51 m) |
| 10月14日~16日 | タッチダウン 1 リハーサル 1-A(TD1-R1-A)(10月15日,最低高度 22.3 m) |
| 10月23日~25日 | タッチダウン 1 リハーサル 3(TD1-R3)(10月25日,最低高度 12 m) |
| 10月27日~11月05日 | BOX-C 運用(11月01日,最低高度 2.2 km) |
| 11月下旬~12月下旬 | 合運用 |
1 回目の BOX-C 運用(07月17.25日)や中高度運用(07月31日.08月02日)では,まずは高度を 6 km ないし 5 km まで下げてみる運用を行った.この二つの運用は,ナビゲーションの手法が異なり,BOX-C 運用はホバリング方式であるが,中高度運用の方はタッチダウンのときと同じ手法を用いている.
次に,重力計測運用(08月05~10日)であるが,リュウグウの重力を計測するために降下の途中から自由落下状態(上昇の時は自由上昇の状態)とし,探査機の動きからリュウグウの重力を推定した.続く BOX-B 運用(08月18日~09月07日)では,探査機をリュウグウの南極方向および西側の方向(夕方の方向)に移動させて,ホームポジションからとは異なる角度での観測を行った.
そして,タッチダウンに向けてより接近する運用が始まる.タッチダウン1リハーサル1(TD1-R1,09月10~12日)では,40 m 以下まで降下する予定だったが,レーザ高度計の計測値に問題が生じ約 600 m まで降下したところで上昇に転じた.このレーザ高度計の問題についてはすぐに解決策が分かったので,MINERVA II-1 分離運用(09月19~21日)および MASCOT 分離運用(09月30日.10月04日)を実行した.JAXA で開発した質量約 1 kg の 2 機の小型ローバである MINERVA II-1 とドイツ・フランスが開発した質量約 10 kg の着陸機である MASCOT は,すべてリュウグウに着地することができ,リュウグウ表面でデータを取得することができた(図 6).なお,これらの運用で,探査機は高度 50 m くらいまで降下した.

Image Caption :
図 6. MINRTVA-II 1 の Rover-1B によって撮影されたリュウグウの表面.2018年09月23日 10:10(日本時間)頃に再着地頃したときの画像.(画像クレジット:JAXA)
ここまでの運用の結果に基づいて,タッチダウン運用について検討を行ったが,予定していた2018年10月末のタッチダウンは延期することになった.これは,リュウグウがボルダーで覆われていて広い平らな場所がなく,着陸のためにはより精度を上げた探査機の航法誘導制御が必要になったからである.着陸候補地点として最もボルダーの少なそうな領域を探したところ,直径が 20 m くらいの場所は存在することは分かった(図 7).
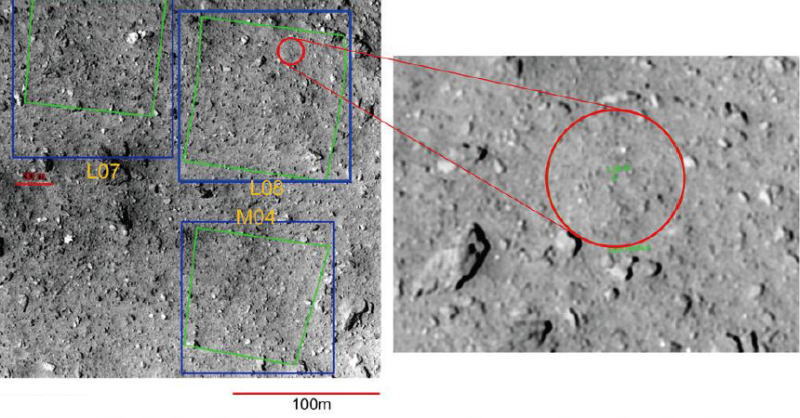
Image Caption :
図 7. タッチダウン候補地点 L08,L07,M04(左)と L08-B と名付けられたボルダーの少ない領域(丸で示す).赤い丸の直径は,約 20 m である.写真は,タッチダウン 1 リハーサル 1(TD1-R1)において2018年09月12日に約 3 km の高度からONC-T(望遠の光学航法カメラ)によって撮影されたものである.(画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
この領域にタッチダウンするためには,着地点付近の地形をより詳細に調べるだけでなく,探査機の運用方法についても検討が必要になる.タッチダウンを延期して,この検討に時間をかけることにしたのである.
タッチダウンは延期としたがリハーサルは継続し,2 回目のタッチダウンリハーサルとなるタッチダウン 1 リハーサル 1A(TD1-R1-A,10月14~16日)と 3 回目となるタッチダウン 1 リハーサル 3(TD1-R3,10月23~25日)を行った.これらのリハーサルでは,近距離で高度を計測するレーザ・レンジ・ファインダ(LRF)の機能を確認し,さらに TD1-R3 では,ターゲットマーカをタッチダウン候補地点の近くに投下することにも成功した(図 8).
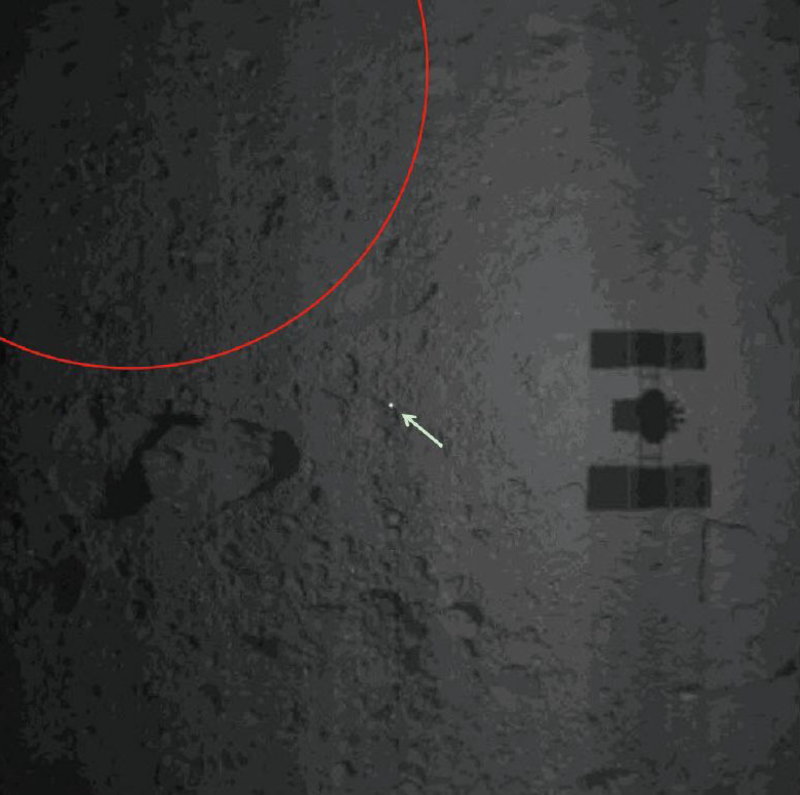
Image Caption :
図 8. ターゲットマーカが静止した位置.矢印の先の白い点がターゲットマーカ.広角の光学航法カメラ(ONC-W1)によって,2018年10月25日 11:47(日本時間)に撮影.このときのリュウグウ表面からの探査機の高度は約 20 m である.丸で囲んだ領域は,図 7 で示された L08-B の領域である.(画像クレジット:JAXA)
これらのリハーサルでは,探査機は高度 22 m および 12 m まで降下した.最低高度付近では,ONC-T による撮影も行い,リュウグウ表面の高解像度の写真を探査機からも撮影した(図 9).リュウグウは,遠くから見ても近くから見ても岩塊で覆われた天体であることがわかる.
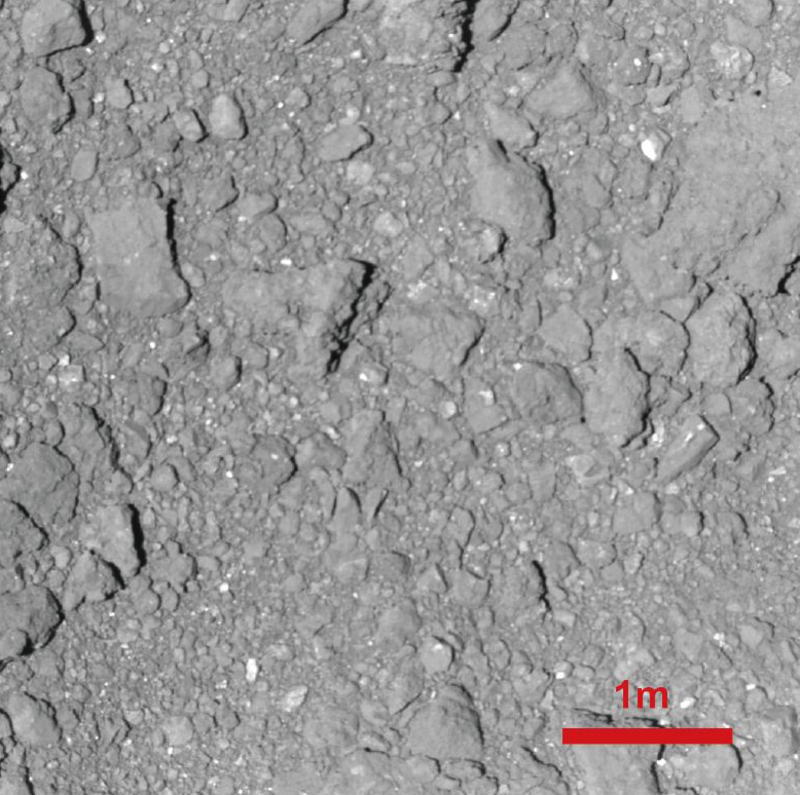
Image Caption :
図 9. 望遠の光学航法カメラ(ONC-T)によって高度約 42 m からの撮影されたリュウグウ表面のようす.TD1-R1-A の運用を行っていた2018年10月15日 22:40(日本時間)に撮影された.(画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
さらに,投下したターゲットマーカをきちんとカメラで捉えることができるかどうかを確認するために,2 回目となる BOX-C 運用(10月27日~11月05日)を行い,高度約 2 km からターゲットマーカをはっきりと撮影することができた.
以上で,2018年内に行う降下運用は終了である.2018年11月下旬から12月末までは,合(conjunction)の期間となり,地球から見ると探査機が太陽に重なる方向に位置することになる.この期間は安定した通信が行えなくなる可能性があるので,クリティカルな運用は行わず探査機は安全な軌道に入れておく.
6. 今後の展開
2018年11月初めまでの運用で,タッチダウンに向けた準備はかなりできてきたと言える.ただし,図 7 で示したように,タッチダウンの候補地点は直径が 20 m くらいしかない.ここに正確に着陸するための運用方向を合の期間を使って検討する.実際のタッチダウンを行うのは,2019年に入ってからとなる.
まずは 1 回目のタッチダウンを成功させないといけないわけだが(図 10),その後には,衝突装置を使ったさらにリスクの高い実験が待っている.また,3 機目の MINERVA-II 2 の運用もある.そして,2019年終わりにはリュウグウから出発し,2020年末にカプセルを地球に戻すという大仕事が待っている.地球にカプセルが戻ってくれば,いよいよ物質分析となる.まだまだ先が長いミッションであるが,現時点で,とりあえずその中間地点まではたどり着いた.
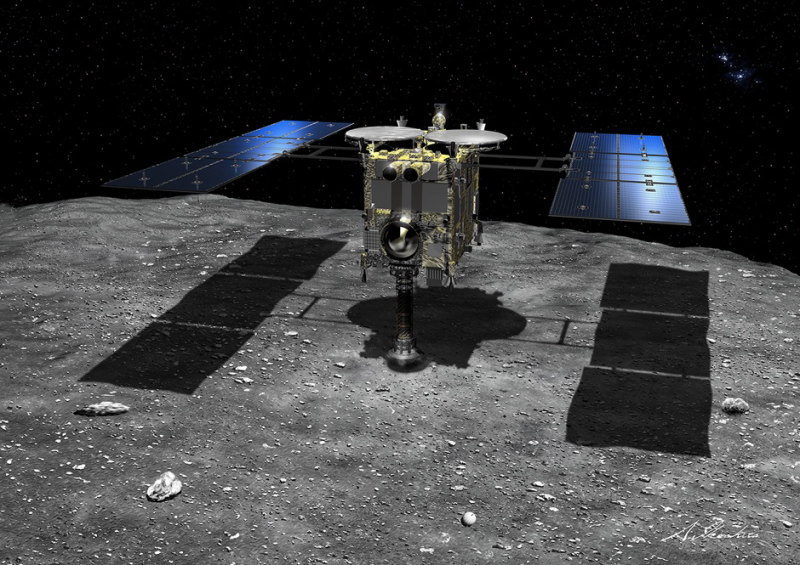
Image Caption :
図 10. リュウグウ表面にタッチダウンする「はやぶさ2」の想像図.実際のリュウグウはこの想像図は全く異なっており,表面は大小多数の岩塊で覆われている.(イラスト:池下章裕)
残りの半分もきちんとミッションを進めて行くとともに,これまでに得られたサイエンスおよび工学の結果を,是非,新たな研究や探査に展開していくことが重要である.
参考文献
[1] 吉川真, 2012, 日本航空宇宙学会誌 60, 455.
[2] Tsuda, Y. et al., 2013, Acta Astroautica 91, 356.
[3] Yoshikawa, M. et al., 2014, Trans. JSASS Aerospace Tech. Japan 12, ists29, Tk_29.
[4] Matsuoka, A. and Russell, C. T. (Eds.), 2018, Hayabusa2 Revealing the Evolution of C-Type Asteroid Ryugu, Springer.

Akira IMOTO
Editorial Chief, Executive Director and Board of Director for The Planetary Society of Japan