次世代太陽系探査
はやぶさ2からポストはやぶさ2へ : April 03, 2018. Latest
小惑星の形状を調べる
原文 - 日本惑星科学会誌「遊・星・人」第26巻(2017)3号 - PDF
小惑星の形状を調べる
火の鳥「はやぶさ」未来編 その12
平田成(会津大学先端情報科学研究センター)、はやぶさ2形状モデルチーム
※ この遊星人記事は、日本惑星科学会遊星人編集専門委員会より許可を得て掲載しております。
要旨
小惑星探査では,探査機の到着後に対象天体の形状を,画像を元に推定する必要がある.本稿では,まず2005年のはやぶさによる小惑星 Itokawa 観測の際に用いられた小惑星形状の推定の手法について述べる.さらに,来年2018年のはやぶさ2の小惑星 Ryugu への到着に備えた,はやぶさ2形状モデルチームの準備状況についても解説する.はやぶさ2形状モデルチームでは,はやぶさでも用いられた手法と,新規の手法を組み合わせて,確実な形状モデル作成を行う計画である.現在,はやぶさ2プロジェクトで実施されている着陸地点選定運用訓練を通じて,作業手順のバグ出しや,得られる形状モデルの精度評価などを進めている.
1. はじめに
はやぶさ2のような小天体探査機がその目的地にたどり着いた時,まず行うべきことは何だろうか?
多くの人が探査機からの第一報としてイメージするのは,その天体の姿を捉えた画像であろう.小天体の姿,言い換えれば形状を地上からの,あるいは地球回りの天文衛星などによる観測であらかじめ知るのは難しい.光学観測ではごく一部の「大きな」小天体しか分解像を得ることはできない.レーダー観測は小さな天体の形状を直接計測できる強力な手法であるが,観測のチャンスは多くない.また,後述するが,レーダー観測にも限界はある.結局のところ,われわれは探査機が目的地に到着して初めて,その天体の具体的な姿かたちを知ることになるのである.
天体の形状は,その天体のごく基礎的な情報の一つであり,形状モデルの作成は,探査ミッションの最初に行うべき重要な事項である.作成された形状モデルは,それ自体が理学的な成果物であり,小惑星の全体形状やクレーターなどの表面地形の計測に使われるほか,密度や内部構造の推定を行う際にも参照されることになる.また,小惑星表面の分光観測データの正しい解釈のためには,観測場所の日照条件などを元に,適切な測光補正を施す必要がある.ここでも形状モデルが用いられるため,他の理学的な解析の基盤としても重要なデータである.
さらに,ミッションが進行している最中,すなわち探査機が小惑星近傍に滞在している期間でも,その運用計画の策定のために形状モデルが必要とされている.周知のように,はやぶさ2ではミッション期間中に小惑星表面に着陸しての試料採取を複数回予定しているほか,着陸機の投下や衝突装置を用いた人工クレーターの形成実験も計画している.これらのイベントを安全,確実に実施するためには,地形的に探査機,着陸機の安全性が確保され,かつ期待される科学的知見を得ることができる適切な小惑星上の地点を選ぶ必要がある.形状モデルはこれらの地点選定の基礎情報となる.
本稿では,2018年夏の Ryugu への到着に向けてはやぶさ2プロジェクトで準備されている,小惑星形状推定のための手法について解説する.はやぶさ2では,その先行プロジェクトであるはやぶさ(いわゆる「はやぶさ初号機」)での経験を踏まえたミッション検討が行われてきた.そこで,まずははやぶさにおいて小惑星形状の推定がどのようにして行われたのかの説明から始めたい.
2. はやぶさの場合
2005年9月から11月にかけて,はやぶさによって小惑星 Itokawa の探査が行われた.当時筆者はカメラとレーザ高度計(AMICA, LIDAR)の理学チームの一員として,探査機による Itokawa の観測とそのデータの解析,そしてそれに続く着陸運用に参加した.先に述べたミッション中の形状モデル構築の重要性は,当然ながらはやぶさプロジェクトチームにおいても認識されており,複数のチームが Itokawa の形状の推定に取り組んだ(Demura et al., 2006 [1]; Gaskell et al., 2008 [2]; Maruya et al., 2006 [3]).
はやぶさの到着に先立ち,レーダー観測に基づく Itokawa 形状の推定が行われていた(Ostro et al., 2004a; 2005 [4, 5]).図 1 は,レーダーによる Itokawa の推定形状と,はやぶさによる探査で明らかになった実際の Itokawa の形状を比較したものである(Ostro et al., 2004b [6]; Demura et al., 2006 [1]; Gaskell et al., 2008b [7]).Itokawaの形状はよくラッコに例えられ,頭部と胴部の二大ブロックと,それを繋ぐややくびれた頚部が特徴になっており,全体としては軸比の大きな細長い天体である.レーダーモデルでは,軸比はほぼ再現できていたが,二大ブロックの存在は全く認識されていない.また,最終的にはやぶさの着陸目標地点選定の決め手になった,Itokawa 表面地形の二分性,すなわち比較的平坦な smooth terrain と数 m サイズの岩塊に覆われた rough terrain の存在もわからない.Itokawa の形状が明らかになった現在の視点で,改めてレーダー画像([5] の Fig. 2a など)を見直してみると,二大ブロックが存在しているとも解釈可能なパターンを見て取ることも不可能ではなく,頚部のくびれに対応する地形も見えてくるようにも思える.しかし少なくとも当時,はやぶさの近接観測によって Itokawa の形状と地形が明らかになった際には,関係者の中では「Itokawa がこのような天体であったとは全く予想していなかった」という声が驚きとともに出ていたことは確かである.
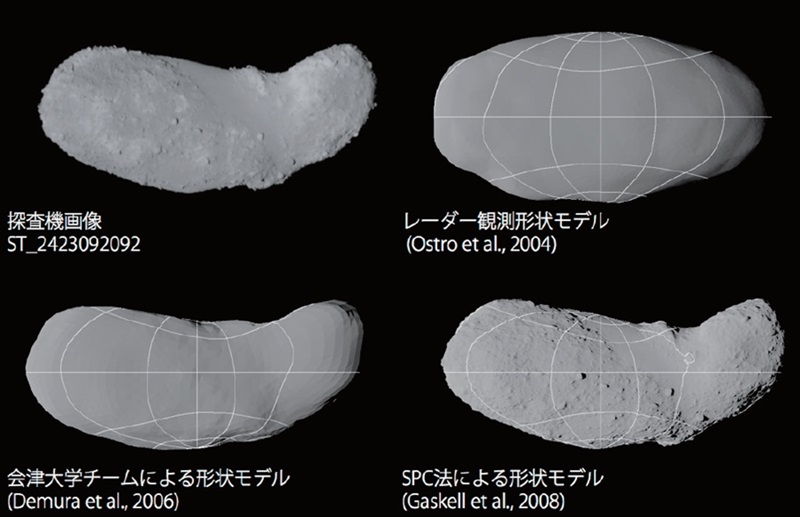
Image Caption :
図 1. はやぶさ搭載カメラAMICAによって撮影された小惑星 Itokawa(左上)と,レーダー観測または AMICA 画像から各種手法によって推定された Itokawa の形状から作成した模擬画像(左上~右下).模擬画像は,探査機画像とほぼ同じく小惑星を緯度 0 度,経度 90 度方向から見る設定で作成されている.ただし,模擬画像における太陽位相角は地形を強調するため探査機画像より大きい 30 度に設定してある.また,経緯線のグリッドを 30 度間隔で描画している.
Image Credit : 遊星人
さて,はやぶさにおいて形状推定に使用された手法について見ていこう.まず,会津大学のチームは,シンプルなステレオ視の手法をとった.詳しくは当時の報告(小林ほか, 2004 [8])を参照されたいが,1)スーザンオペレータを用いた画像中の特徴点抽出,2)画像ペア間の対応点の探索,3)エピポーラ幾何を用いたカメラパラメータと対応点の三次元座標の推定という手順によって,小惑星表面の画像的に特徴を持つ(輝度変化のパターンが明瞭であるなど)地点の三次元座標を推定し,小惑星全体の形状を復元した.オーソドックスではあるが,当時の会津大学の学生(B4 .M2)がほぼスクラッチでコードを開発した,という点は特筆できる.ただし,画像中に見つけ出せる特徴点の数密度が形状モデルの解像度を決めることになることと,輝度変化が少ない smooth terrain ではあまり多くの特徴点が得られないという問題もあった.
次に紹介するのは,はやぶさプロジェクトの工学系側と協力して探査機ハードウェアを開発し,運用にも携わった NEC が採用した手法である[9].彼らは小惑星の画像からそのシルエットを抽出し,リム形状から小惑星の三次元形状を推定するリムプロファイリング法とステレオ法を組み合わせた.リムプロファイリング法は簡便であるが,原理的に Itokawa の頚部のようなくびれ部分の形状の再現ができない.これにステレオ法を組み合わせることで,二つの手法の欠点を補いながら形状を推定している.
はやぶさプロジェクトは,NASA の全地球的地上局システム DSN を利用して,探査機の運用を行なっていた.また,一時期は NASA の開発した超小型ローバの搭載も検討されていた(結局実際の搭載は見送られた)ことなどもあった.そのため,NASA と ISAS は協定を結び,はやぶさプロジェクトに米国からの Co-I を受け入れていた.このプログラムに基づいて JPL から派遣された R. Gaskell 氏は,氏が長年開発していた Stereo Photoclinometry(SPC)法を持ち込み,Itokawa の形状推定を行なった.SPC はその名の通り,ステレオ法と photoclinometry 法を組み合わせた手法である[2]. Photoclinometry(あるいは shape-fromshading とも)はあえて和訳するならば測光斜度推定法とでもいうべき手法で,画像中の小惑星像の画素ごとの輝度変化が,その画素に対応する小惑星表面の法線方向の変化によるものと考え,法線方向,つまり斜度の変化を推定することで,地形を復元するものである. Photoclinometry で広い範囲の地形推定を行おうとすると,原理的に誤差が蓄積するのを避けられないが,SPC では画像を小領域に分割し,分割画像間の三次元的な位置関係はステレオ法で決定した上で,小領域内の地形を photoclinometry で求める手順を取っている.これによって,全球的な整合性を保持しつつ,高い空間分解能で形状を推定できるのが特徴である.さらに,SPC では NEC のチームも用いたリムプロファイリング法も補足的に用いている.
Itokawa の形状推定に用いられた主要な画像は,Itokawa 到着後,距離約 7 km(いわゆるホームポジション)まで接近し,2005年9月30日から10月1日の二日間にかけて集中的に観測を行った,グローバルマッピングの期間中に取得された.この直後にはやぶさは,姿勢制御用の装置として 3 機搭載されていたリアクションホイールの 2 機目が機能不全を起こし(1 機目は Itokawa 到着前にすでに問題を起こしていた),安定した姿勢をとることが難しくなった.このため,これ以降の観測の機会が大きく減少し,グローバルマッピング以後取得された画像の枚数はあまり多くない.特に,Itokawa にさらに接近して撮像された高解像度画像や,Itokawa および光源である太陽に対する探査機の位置関係を変えて撮像された画像の枚数が限られていたのは,Itokawa の全体形状の高精度の推定や,小スケールの地形までの復元に対してはマイナスであった.
いずれにせよ,前記のような複数の手法を準備した上で,はやぶさプロジェクトは Itokawa とのランデブーに臨んだ.最初に NEC のチームと会津大のチームがそれぞれの形状モデルをリリースし,やや遅れて Gaskell 氏のチーム(氏ただ一人のワンマンチームであったが)もモデルをリリースした.これらの複数の形状モデルを用いて,着陸地点候補の選定が行われ,最終的な着陸点目標点は10月末に決定された.当時のプレスリリースにも,3 チームそれぞれの作成した形状モデルが図版の源泉として使われている[10].その後のはやぶさの Itokawa への着陸への過程やその顛末は本稿の趣旨から離れるため省くが, 探査機が Itokawa へ接近する過程で時々刻々地球に転送してくる画像に見えている地形上の特徴点(グラウンドコントロールポイント,GCP)と,形状モデル上に設定された GCP の三次元座標から,Itokawa に対する探査機の相対位置を推定する光学航法も行われていたことは述べておきたい.
その後も各チームは形状モデルの改良に勤め,はやぶさの初期成果論文シリーズの中には会津大学チームの形状モデルに基づく,小惑星の地形学的解析の結果が含まれている[1].また,Gaskell 氏のチームによる SPC のモデルが,最終的には最も詳細かつ正確な形状を再現することに成功し,Itokawa 形状モデルの決定版として公開され,広くコミュニティで利用されている.
この節の最後に,余談としてはやぶさのミッション期間中に筆者が体験したエピソードを一つ紹介したい.Itokawa の形状モデルが得られた直後,着陸地点の選定を行うための情報の一つとして,着陸地点候補の地表面が地球に対してどれくらいの傾きを持っているかを急いで調べて欲しい,との要請が探査機の運用チームから筆者に寄せられた.着陸の際に,探査機はアンテナを地球に向けた姿勢を維持しながら小惑星に向けて次第に高度を下げていくが,着陸直前にローカル地形に沿うように姿勢を変える必要がある.この状態でも地球との通信の成立させるため,地形の傾きには許容範囲が設定されていた.着陸地点候補がこの条件を満足するか否かを評価する必要があったわけである.本来なら,小惑星から見た時の地球の方位を計算して,着陸地点候補地点の地表面に対する地球方向角(傾斜角)を求めるべきところであったが,運用チームが非常に急いでいる様子だったため,著者は quick and dirty な方法を取ることにした.形状モデルの断面図を作成して印刷し,そこに分度器(宇宙研の売店で急遽買ってきた)を当てて,角度を測定したのである.これは,Itokawa の自転軸が黄道面に対してほぼ垂直であったことも利用した,一見冴えたやり方(もちろん自画自賛である)であった.しかし,当時は形状モデルを作成することまでで手一杯であって,それ以降に何をなすべきか,という処理・解析から判断,意思決定に至る道筋の準備が手薄だったために,このような緊急手段まで使われた,ということも言えるだろう 1.本来探査ミッションは,考えうる準備は可能な限り整えた上で,緊急・突発事態には臨機応変に対応すべきものである.このエピソードを直接教訓としたわけではないが,はやぶさ2プロジェクトではかなりの労力を割いて事前の準備を進めており,本番に備えようとしている.
3. はやぶさ2の場合
はやぶさ2の目的地である小惑星 Ryugu は,地上からのライトカーブ観測と,赤外線天文衛星による観測が実施され,その物理的特性についての推定が行われている[11].はやぶさ到着前の Itokawa ほどには,十分な精度での情報は得られてはいない.Ryugu を対象としたレーダー観測が行われていないことも影響しているが,その他に Ryugu が球形に近い形状をしているらしいことも効いている.小惑星の形状が球形に近いと,ライトカーブの振幅は小さくなり,形状のほか,自転軸方向,自転周期といった自転状態に関するパラメータの推定に対する拘束条件も弱くなる.結果として,はやぶさ2では,これらの情報についての不確定性は大きいまま,探査機の到着を迎えることになりそうである.探査機から小惑星の画像を撮った時に小惑星表面のどの部分が観測されるのかは,小惑星の形状だけでなく,自転状態にも寄っている.つまり,形状と自転状態は,観測上相互に強く関連しているわけである.Itokawa の場合,先述のレーダー観測によって,自転パラメータは一定の精度で決定済みの状態で,近傍観測の最初から形状の推定そのものに集中することができた.しかし,Ryugu では形状と自転パラメータの推定を同時に行うという,Itokawa より困難な課題にまず取り組まなくてはならない.
はやぶさの時と同様に,はやぶさ2でも複数の手法を併用して,Ryugu の形状の推定に取り組む予定となっている.まず,はやぶさの時にその有効性が確認された,SPC が今回も使用される.はやぶさ以後,SPC は Dawn や Rosetta,Messenger など,複数の探査ミッションで使用され,その都度良質の形状モデルを作成することに成功している.また,米国の小惑星サンプルリターン計画である OSIRIS-REx においても,小惑星形状推定の中核的な方法として SPC が採用されている.今や,小天体探査における形状推定方法の第一選択として,はやぶさ2でも採用することとなった.はやぶさの時と異なるのは,ソフトウェア自体は開発者である Gaskell 氏から提供を受けるものの,それを使用するのははやぶさ2サイエンスチームの中に組織された,はやぶさ2形状モデルチームの国内メンバーである点である.はやぶさ2 は,OSIRIS-REx との間で国際的な研究協力を構築し,人的な交流や小惑星科学に関する知見の交換を行なっている.その枠組みの元で,去る2016年から OSIRIS-REx チーム内での形状推定担当者を招いた SPC の講習会なども実施し,形状モデルチームメンバーの SPC 利用のスキル向上が図られている.また,講習会を通じた国内の SPC ユーザー数の拡大も目指している.はやぶさ2の後も,これに続く小天体ミッションが複数国内で検討されていることを考えれば,小惑星形状推定のスキルを持った若手研究者の養成は極めて重要である.
もう一つ,商用ソフトェアを活用した形状推定も,有力な方法として準備が行われている.2005年の時点では,画像からの形状推定はまだ特別な技術の一種であって,コンピュータビジョンの研究者が個別にソフトウェアを開発して自分で利用するか,需要ごとに専用のソフトウェアが多額の費用を投じて開発され,利用されているような状態であった.当時の会津大学で開発された,Itokawa の形状推定のためのツールもそのような範疇のものと考えることもできる.しかし,その後の約 10 年で状況は大きく変わっている.多くの人がスマートフォンで気軽に高画質のデジタル画像を撮り,ドローンも地上物の空撮に広く使われるようになっている.これらの画像から,様々な物体の形状を推定するための商用ソフトウェアが気軽に入手できるようになっている.多くのユーザーに支えられて開発とサポートが行われる商用ソフトウェアは,研究室レベルのものに比べて非常に高い可用性を持つ.また,コストも専用ソフトウェアに比べれば圧倒的に低い.はやぶさ2形状モデルチームでは,ロシア企業の Agisoft が開発・販売している PhotoScan というソフトウェア[12]を,Ryugu の形状推定に用いることを計画している(図 2).
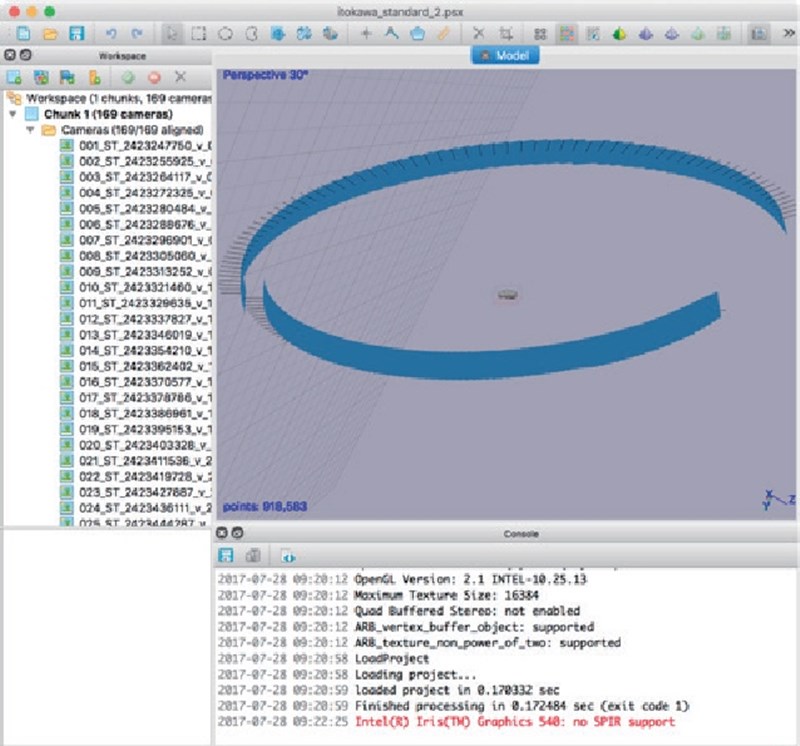
Image Caption :
図 2. Agisoft PhotoScan で「はやぶさ撮像」の画像を元に小惑星 Itokawa の形状モデル作成を試みた例.(a)左にリストされている画像を元に,小惑星形状(画面中央の小さな像)と撮像位置(小惑星を取り囲む正方形の連なり)が推定されている.
Image Credit : 遊星人
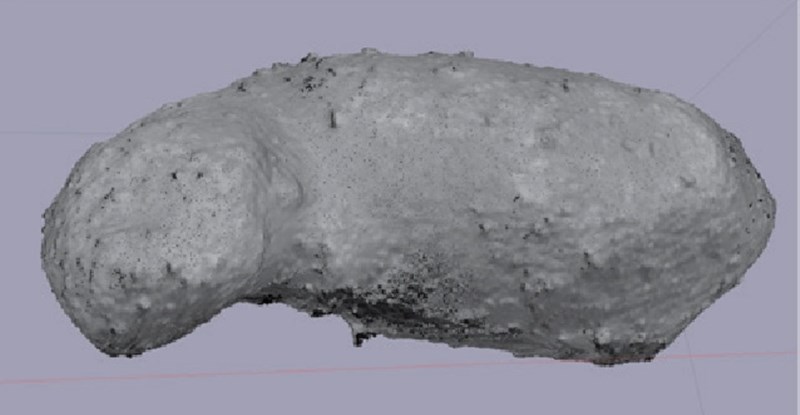
Image Caption :
(b)小惑星形状モデル部分を拡大したもの.
Image Credit : 遊星人
PhotoScan は,Structure-from-Motion(SfM)及び Multi View Stereo(MVS)という二つの手法を組み合わせて,複数の画像から対象の形状を復元する.SfM は一般的なステレオ法の拡張ともいうべき手法であり,画像中に設定された特徴点間の対応関係から,画像撮像時のカメラの位置,姿勢と対象物の三次元座標を同時に推定することが可能である.この段階では,特徴点に対応する対象物表面の点のみからなる疎な三次元点群が復元されるが,続く MVS によって,疎な点群の間を埋める密な点群,及び点群から構築される精細なポリゴンモデルを作成することができる.PhotoScan は教育機関向けに低価格なライセンスが設定されているためか,惑星科学に限らず自然科学分野の多方面で利用されているようである.最近は日本地球惑星科学連合の複数のセッション(主に地形学,防災関連のセッション)で,PhotoScan を使用した事例が発表されている.
はやぶさ2形状モデルチームでは,SPC と PhotoScan を二本柱として相補的に活用することで,ミッションの進行の中で適宜 Ryugu の形状モデルを作成することを計画している.SPC は過去の複数の探査ミッションでの実績により,高精度の形状モデルの作成を確実に行える.しかし,作業を進める際には,ユーザーが自分の目で画像を確認しながら,パラメータの変更や,繰り返し処理の回数設定などを行う必要があるため,モデルの完成には時間を要する.一方,PhotoScan は SPC ほどの自由度はないものの,簡単かつ高速に一定の精度の形状モデルを作成することができる.これまでに行った模擬画像による試験では,小惑星の全球を撮像した 100-200 枚の画像から形状モデルを作成する場合,SPC では 1-2 週間程度の期間を要するのに対して,PhotoScan ではモデル作成の前後の作業時間まで含めても,数時間から1日で済むことがわかっている.また,基本的には画像のみをインプットとして処理を行うことができるため(補足的に解析者が GCP を与えることで,より安定した処理を行うことも可能である),先に述べた自転パラメータの不確定性が大きい状態でも,処理を開始できる.このため,PhotoScan を小回りの利く,速報的な形状モデルの作成に用い,SPC では腰を据えた高精度のモデルの作成を行う,という分担にする計画である.なお,いずれの手法も,はやぶさ2搭載カメラ ONC 画像に加えて,形状モデルのスケールを決定するためにレーザ高度計 LIDAR のデータも使用する(SPC の場合は探査機軌道を入力データとするため,間接的に LIDAR データが入る).
他にもいくつかの形状モデル作成の手法が準備されている.探査機の運用を担う工学系のチームでは,はやぶさの時にも使用されたリムプロファイルとステレオ法を組み合わせた手法を準備している.また,国際協力の一環として参加するドイツ DLR のグループは,Stereo Photogrammetry(SPG)と呼ばれるステレオ法による地形推定を行うソフトウェアを持ち込む.実は,SPC と SPG はライバル関係にあり,米独両国が参加した探査ミッション(例えば Dawn)では,それぞれの手法で作成された形状モデルがリリースされている(SPG: Preusker et al., 2014 [13]; SPC: Gaskell, 2012 [14]).はやぶさ2の中でも双方は自らの手法の優位性のアピールに余念がなく,取りまとめの立場である筆者は現場でどのように交通整理をするか,やや贅沢な悩みを抱えている.さらに,ここまで挙げた方法の他にも,はやぶさ2が取得する画像データを技術的挑戦の素材として捉え,新たに形状モデル作成手法の開発を行おうという試みも進められている.有効な手法が完成すれば,はやぶさ2のみならず,それ以降の小天体ミッションでも役立つはずである.
4. 終わりに代えて:LSS 運用訓練
はやぶさ2プロジェクトでは,Ryugu への探査機の到着直後から,搭載機器による観測とそのデータ解析を経て最初の着陸地点選定(Landing Site Selection, LSS)までの過程を模擬する大規模な運用訓練を,2017年の晩春から夏にかけて実施している.この訓練に参加するメンバーは,使用する模擬データを作成するチームと,データを解析し,科学的な価値判断や工学的な安全性,運用の成立性を評価して着陸地点を選定するチームに完全に分かれている.後者には,実際に探査機によって得ることのできるデータに対応する模擬データのみが渡され,模擬データの源泉となっている小惑星の形状,物理特性,表面地質に関する情報は隠蔽されている.模擬データ作成チームは,この訓練に備えて2016年度の後半からデータの準備を進めてきている.著者の知る限り,このような形態での運用訓練を行った月惑星探査ミッションは,国内では過去に例がなく,はやぶさ2プロジェクトが非常に慎重に事を進め,実運用に備えようとしていることが端的に表れている.
形状モデルチームも,解析チームの一員として訓練に参加して,模擬画像から形状モデルを作成するとともに,副産物として自転軸の方向や周期,探査機位置や姿勢の推定を行い,解析チーム内にリリースしている.本稿を執筆している最中も,この作業は続いているが,訓練前には思ってもみなかったトラブルが続出し,その対応に追われる日々が続いている.複数の機器チームが関わり,解析の結果得られるプロダクトが次の解析の源泉となるような,運用と解析の現場では,単に個別のソフトウェアの使用手順に習熟していただけでは対応できないような事象がしばしば起きる.これははやぶさの際にも体験していたことではあるものの,改めて訓練の中で経験を積み,事前計画していた手順のデバッグをしておくことで,本番でのスムーズな対応ができるようになる.さらに,本番において本当の意味で予期していなかった(訓練でも遭遇しなかった)問題に直面した時も,落ち着いて対処できる時間的な余裕を産むことにつながるはずである.
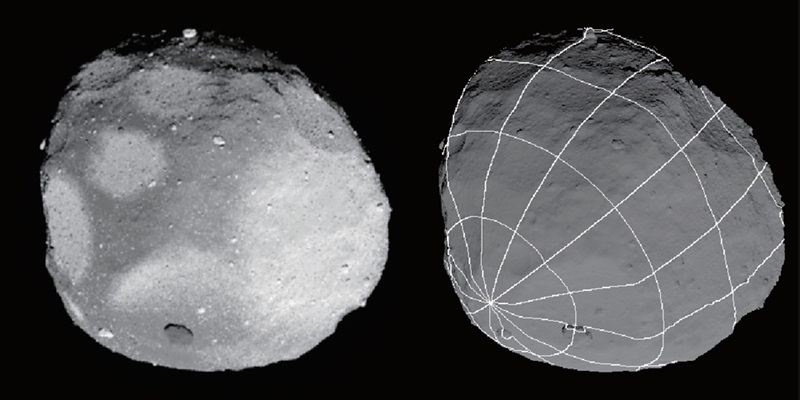
Image Caption :
図 3. LSS 運用訓練用に作成された模擬 Ryugu の画像と,推定された形状モデルから作成した同アングルの模擬画像.
Image Credit : 遊星人
本稿が遊星人に掲載される頃には,訓練はひとまず終了し,模擬データ作成の源泉となった情報が,解析チームにも明かされ,答え合わせが行われることになる.現在われわれが作成している形状モデルは,正解と比べてどこが正しく,どこが間違っているのであろうか(図 3)? ややビクビクしつつも,それを知るのが今から楽しみである.また,終わるのはあくまでも訓練であって,来年2018年夏にはいよいよ Ryugu へのはやぶさ2の到着と,本番のデータ解析が控えている.本当の Ryugu はどのような姿をしているのか? これこそが訓練の(訓練データを準備してくれている方々には申し訳ないが)答え合わせとは比べ物にならないほど楽しみな,探査の醍醐味といえるだろう.
謝辞
はやぶさ及びはやぶさ2プロジェクトに関わった全ての方に心から感謝申し上げます.はやぶさ2プロジェクトの津田雄一プロジェクトマネージャ,渡邊誠一郎プロジェクトサイエンティスト,杉田精司 ONC サイエンス PI には,現在進行中のLSS運用訓練に関わるデータの掲載を許していただきました.特に渡邊誠一郎氏には,本稿の執筆機会をいただいたほか,内容について有益なコメントをいただきました.また,実際に LSS 運用訓練データを作成された皆様,また訓練データの解析を現に進めている皆様にも特に感謝の言葉を述べたいと思います.はやぶさで会津大学の形状モデルチームを率いた出村裕英氏には内容の事実関係の確認をしていただきました.本稿で述べたはやぶさ2 形状モデルチームの活動は,はやぶさ2 プロジェクト,日本学術振興会の研究拠点形成事業「惑星科学国際研究ネットワークの構築」,科研費基盤研究 25287114 及び 17K05639 の支援を受けています.
参考文献
[1] Demura, H. et al., 2006, Science 312, 1347.
[2] Gaskell, R. W. et al., 2008, Meteoritics and Planetary Science 43, 1049.
[3] Maruya, M. et al., 2005, AIAA Guidance, Navigation and Control. Conference.
[4] Ostro, S. J. et al., 2004, Meteoritics and Planetary Science 39, 407.
[5] Ostro, S. J. et al., 2005, Meteoritics and Planetary Science 40, 1563.
[6] Ostro, S. et al., 2004, NASA Planetary Data System.
[7] Gaskell, R. W. et al., 2008, NASA Planetary Data System.
[8] 小林慎悟ほか, 2004, 遊星人 12, 80.
[9] 丸家誠ほか, 2012, 映像情報メディア学会誌 66, 452.
[10] http://www.isas.jaxa.jp/j/snews/2005/1101_hayabusa.shtml
[11] Muller, T. G. et al., 2017, A&A 599, A103.
[12] http://www.agisoft.com
[13] Preusker, P. et al., 2014, Vesta in the Light of Dawn: First Exploration of a Protoplanet in the Asteroid Belt, #2027.
[14] Gaskell, R. W., 2012, American Astronomical Society, DPS meeting #44, id.209.03.

Akira IMOTO
Editorial Chief, Executive Director and Board of Director for The Planetary Society of Japan