次世代太陽系探査
はやぶさ2からポストはやぶさ2へ : March 08, 2020. Modified
TIR で観る小惑星表面のちょっと下
原文 - 日本惑星科学会誌「遊・星・人」第24巻(2015)2号 - PDF
TIR で観る小惑星表面のちょっと下
火の鳥「はやぶさ」未来編 その 09
千秋博紀1,滝田隼2,荒井武彦2,福原哲哉3,田中智2,岡田達明2,関口朋彦4,坂谷尚哉2,はやぶさ2TIRチーム
1. 千葉工業大学惑星探査研究センター, 2. 宇宙航空研究開発機構, 3. 北海道大学大学院理学院, 4. 北海道教育大学
※ この遊星人記事は、日本惑星科学会遊星人編集専門委員会より許可を得て掲載しております。
要旨
TIR(中間赤外カメラ)は,8 から 12 ミクロンの波長帯で熱輻射の 2 次元イメージングを行う.ターゲット天体の 1 自転分の撮像から表層物質の熱履歴をもとめ,そこから熱物性を推定する.表層物質の熱物性は,ミッション遂行に必要な情報であるばかりでなく,その後の天体の運命を決める重要な情報である.
1. 何をしたいですか?
2014年12月3 日の「はやぶさ2」の打ち上げ成功を受けて,一般の方を対象とした講演会でお話する機会を何度か頂いた.その中で聴衆の方々に「もしあなたが小惑星に行く機会を得たとしたら,何を見たい,または測りたいですか?」という質問をしている.すると,「天体の形や地形を見るために写真を撮る」という答えは返ってくるものの,なかなかその先が続かない.初号機の成果を知っている人からは「サンプルを持ち帰って地球で詳しく調べる」という答えが返ってくることもある.中には「天体に穴を開けて地下の物質を回収する」というプロもびっくりのアイディアを披露してくれる小学生もいたが,その子は宇宙が大好きで,「はやぶさ2」について事前にいろいろ調べたのだそうだ.しかし残念ながら「表面の温度を測りたい」という人はほとんどいないようだ.
この記事で紹介するのは,「はやぶさ2」搭載の中間赤外カメラである.読者の方々には,ぜひこの記事を読んで頂き,一般の方向けの講演の機会があれば「温度を測るのは実は科学的にとても大切なんですよ」と宣伝をしていただきたい.
なおこの記事では,紙面に限りがあるため機器性能や較正試験,記事中で紹介する数値モデルの詳細については踏み込まない.性能については,金星探査機「あかつき」に搭載された中間赤外カメラ LIR(TIR は LIR とほぼ同じものとして開発されている)についての本誌の記事[1]を参照していただくか,現在 TIR チームメンバーが準備している論文[2]の完成をお待ちいただきたい.
2. TIR とは
TIR は thermal infra-red(熱赤外)の頭文字をとったものである.「はやぶさ2」搭載装置としての TIR は熱赤外イメージャ(中間赤外カメラ)で,8 から 12 ミクロンの波長で撮像を行い,対象物からの熱輻射量(温度)の分布を計測する.視野角は 16° × 12°,その中にピクセルが 328 × 248 あるので空間分解能はおよそ 0.05° である.これは,「はやぶさ2」が停留する予定の高度約 20 km では,およそ 17 m の分解能に相当する.観測に用いる波長帯(8-12 ミクロン)では多くの物質で熱放射率が高くまた一定である事が知られており,テレビなどで見かける,人間の皮膚の温度を測定するサーモグラフィでもこの波長帯(またはこれよりも短い 3-5 ミクロン)が使われている.「はやぶさ2」の場合には,3-5 ミクロンの波長帯での観測から目標天体の表面温度を求めるわけにはいかない.その理由は,この連載をお読みの方にはおわかりだろう.ピンとこない方にはぜひ,この連載を遡って頂きたい.
TIR は,短期間で確実に開発できるように金星探査機「あかつき」に搭載された中間赤外カメラ(LIR)の設計をほぼそのまま踏襲している.赤外線天文衛星(たとえば「あかり」や「SPICA」)などは光エネルギーを捕える量子型の赤外線センサを採用しており,装置を極限まで冷却することで精度の高い観測を行っている.しかしこの方式では大掛かりな冷却装置が必要であり,重量や取り付け位置,装置サイズに強い制約のある惑星探査機には不向きである.これに対して LIR(TIR)は,小型赤外カメラに採用されている熱型の非冷却の 2 次元ボロメータを採用した.非冷却ボロメータは,センサ素子の抵抗が温度上昇に応じて変化する程度を電気信号として捕える赤外線センサで,2 次元アレイにすることによって対象をイメージングできる.宇宙用としては「あかつき」LIR で初めて採用された最新の技術である.LIR(TIR)では,センサとレンズの間に設置したシャッターを開閉させて連続撮像し,差分画像を作成(いわゆるチョッピング)することによってノイズを低減させる.それでも取りきることができないノイズについては,地上試験を繰り返すことでそのレベルを評価する.また,LIR(TIR)はピクセル毎に感度が異なるため,地上試験によって得られたデータをもとに,ピクセル毎の較正線を引く必要がある.今のところ,ピクセル毎に乗るランダム誤差は 0.3 K 相当,1枚の画像全体に乗ってくるバイアス誤差は 3 K 相当と見積もられている.
金星探査機「あかつき」に搭載された LIR が想定しているターゲットである雲頂の温度は 220-250 K と見積もられている.これに対して,「はやぶさ2」のターゲット天体の表面温度は,日照時には 250-400 K か,条件によってはそれ以上になることが想定される.このため,出力がさちってしまわないための調整が必要である.ターゲット温度が高いことにはメリットもある.熱輻射は全波長で積分すると温度の 4 乗に比例するが,限られた波長帯のみで積分された輻射量は,一般には温度の 4 乗に比例しない.しかし, 300-400 K の範囲内では 8 から 12 ミクロンの波長範囲での輻射量はほぼ温度の 4 乗に比例している.それよりも低温ではベキは大きくなるため,同じダイナミックレンジに対して,計測可能な温度範囲が狭くなってしまう(図 1).
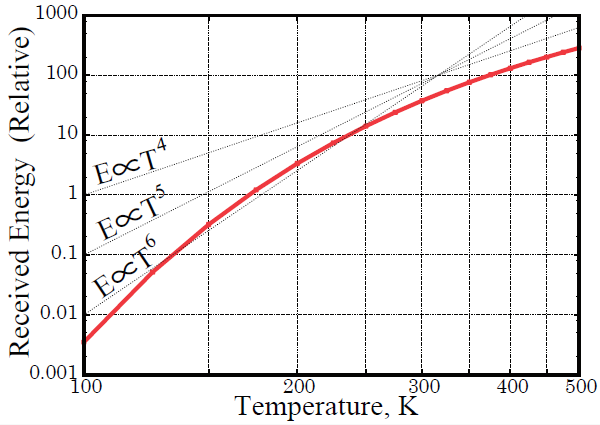
Image Caption :
図 1. ターゲット温度と,TIR が受ける輻射量の関係.
Image : 遊星人
3. 温度分布からわかること
大気を持たない小天体の表面温度は,大雑把には日射量で決まる.つまり朝方と夕方は温度が低く,昼間は温度が高い.しかし深さ方向の温度分布を考慮すれば,熱伝導の影響によって,日射量の変動に対して表面温度の応答が遅れる.この,応答の遅れの程度を表すパラメータが熱慣性である.熱慣性は熱伝導率,密度,比熱の積の平方根(√kρCP)で与えられ,SI 単位系では J/m2 Ks1/2 という次元をもつ.数学的に定義されたものなので次元のへんてこさには目をつぶるとして,大切なのは熱伝導の良いものほど熱慣性は大きい(温度が変化しにくい)ということだ.熱伝導の良い物質は,陽が昇っても日射として受けたエネルギーの一部を地下に伝えてしまうため表面温度は上昇しにくく,逆に陽が傾いてからは地下に溜めこんだ熱が伝わってくるため表面温度が下がりにくい,と考えれば理解しやすい(図 2).
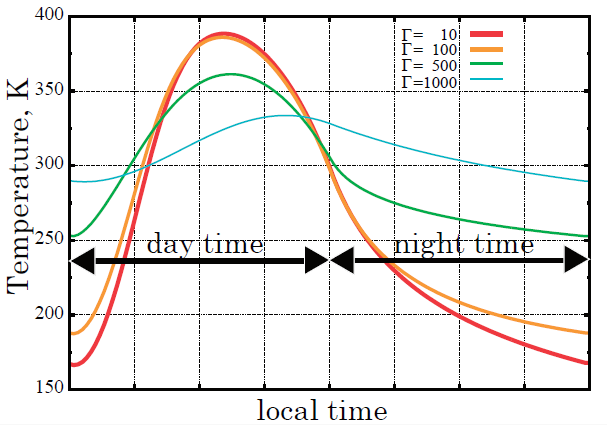
Image Caption :
図 2. さまざまな熱慣性における表面温度変化プロファイル(日心距離 1 AU,自転軸傾斜角 0 度の場合の,赤道での温度変化).
Image : 遊星人
天体表面で熱伝導率を大きく変化させる要因は,内部の空隙や粒子サイズである.組成が同じでも,隕石のように内部に多少の空隙を含む物質の熱伝導率は,稠密な岩石に比べると 1 桁,砂利やダストのような非常にふわふわな物質では 2-3 桁小さいことが知られている.このことから逆に,観測から熱慣性が求まればその岩石の空隙率または表面を覆うダストの粒子サイズに関する情報を抽出できる可能性がある.これまでに,小天体表層の熱慣性は天体サイズと相関がある,という提案がなされているが,これは表層物質の状態を反映しているのだろう[3].ただし,ここでいう「表層」は,自転周期で決まる熱拡散距離程度の厚さの層の平均を意味する.「はやぶさ2」のターゲット天体の場合,「表層」の厚さは稠密な岩石の場合で 17 cm 程度,ふわふわな物質の場合はもっと薄いと見積もられる.このため,TIR は天体表面の少し下の物性を見ている,と言ってもよいだろう.
熱慣性の影響で太陽の南中時刻と最高温度が達成される時刻に違いが生じると,熱輻射の反作用によって天体の軌道が変化し得る.天体の自転軸の方向と公転軸の方向が揃っている場合には天体の軌道は広がってゆくのに対して,自転軸の方向が公転軸と反対の方向を向いている場合には天体の軌道は縮んでゆく(図 3).これをヤルコフスキー効果と呼ぶ[4].ヤルコフスキー効果は,日周期に対してのみならず,年周期についても応用できる(地球の場合,一番暑いのは夏至ではなくその後であることを思い出してほしい).この場合は天体の軌道は必ず縮む方向に働く.
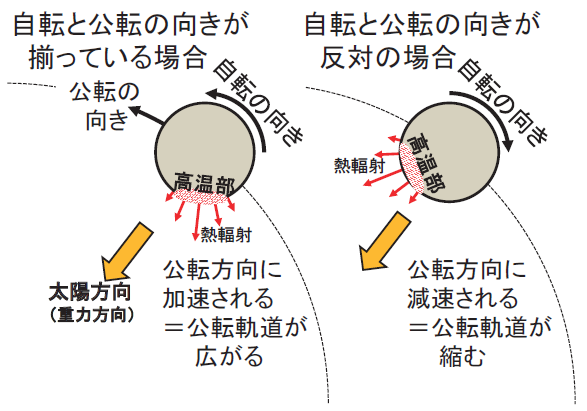
Image Caption :
図 3. ヤルコフスキー効果.
Image : 遊星人
一方,天体表面に 凹凸 がある場合には,後で述べるように,表面温度が地形に強く依存する.この時,非等方な輻射によってトルクが生じ,自転周期が変化する.この効果は提案者の頭文字を取って YORP 効果と呼ぶ.ヤルコフスキー効果も YORP 効果も,天体表面上の温度分布で決まるものなので,その影響の程度を見積もるには TIR による直接観測が必要不可欠である.ただし,公転軌道や自転周期は非常に長い時間をかけて変化するので,探査期間中には直接的な証拠は得られないだろう.このため,「はやぶさ2」のミッションフェーズが終了し,探査機がターゲット天体を離脱した後も,地上からターゲット天体の観測を継続する事が肝要である[4].
「はやぶさ2」の観測計画の立案を難しくさせている要因のひとつに,ターゲット天体の自転軸がわかっていない,という事がある.このため,観測期間のなるべく早いうちに自転軸の向きを決定させる必要がある.「はやぶさ2」では今のところ,光学航法カメラ(ONC)の撮像データから自転軸の方向を決めることを考えている.一方,TIR による観測からでも自転軸の向きを制約できる可能性がある.太陽直下点と最高温度到達点が分離できれば,等緯度線はそれらを結ぶように引けるはずだ.等緯度線は大円ではないので 1 本引いただけでは極の位置は求まらないが,全球的な温度分布(熱履歴)も考え合わせれば,極の位置(自転軸の方向)はおおよそ求めることができる。もし,ターゲット天体の上に目印となるような地形がない場合には,TIR による温度分布が重要となるだろう.
4. 温度分布から熱慣性を求める
天体の形状が球の場合には,表面の温度分布は比較的容易な数値計算で求めることができる.実際,「はやぶさ2」の目標天体はイトカワのような長細い構造ではなく,ずっと球に近い形状だと思われているので,形状を球で仮定することは全くの見当外れというわけではなさそうだ.目標天体の自転周期であるおよそ 7.6 時間に相当する熱の浸み込み深さは,稠密な岩石の場合でも 17 cm 程度であり天体スケールに比べると十分小さい.このため熱の水平方向の移動は考えず,太陽入射光を境界条件とする 1 次元の熱伝導問題をさまざまな緯度について解くことで自転に伴う表面温度の日周変化を求める.「はやぶさ2」の目標天体の場合,公転周期に比べて自転周期は十分に短いため,その間の太陽位相角の変化は考慮しなくて良い.
こうして求められた,表面温度の緯度,ローカルタイム依存性をもとに TIR の模擬画像を求めたのが図 4 である.この図を作るための計算では,熱慣性の値として SI 単位系で 400 を想定した.また,図には参考のために緯度・経度線および太陽直下点の位置も示した.この図から,最高温度の到達時刻は南中時刻とは異なっていることが見て取れる.

Image Caption :
図 4. TIR 模擬画像.
Image : 遊星人
次に,こうして作られた模擬画像からスタートして,熱慣性を求める方法を考える.模擬画像の各ピクセルの緯度経度を求め,特定の緯度 ± 2° の範囲に含まれるピクセルの温度を,その経度(ローカルタイム)の関数としてグラフ化したのが図 5 である.少し乱暴だが,最高温度付近の温度履歴を 2 次曲線でフィッティングすると,その関数形(関数の係数)から最高温度が達成されるローカルタイムを求めることができる.この操作を,異なるノイズを載せた模擬画像に対して繰り返し行い,また熱慣性が異なる条件に付いて生成した模擬画像についても同様の操作を行う事で,熱慣性の決定精度を求めることができる(図 6).この記事では詳細は省略するが,天体表面上で等緯度線に沿って物性値が同じ場合には,ホームポジションからの 1 枚の画像があれば熱慣性は 10 % 以下の精度で求めることができそうだ.

Image Caption :
図 5. 特定緯度範囲の,最高温度到達点付近に相当するピクセルを抜き出して,2 次関数でフィッティングした例.
Image : 遊星人
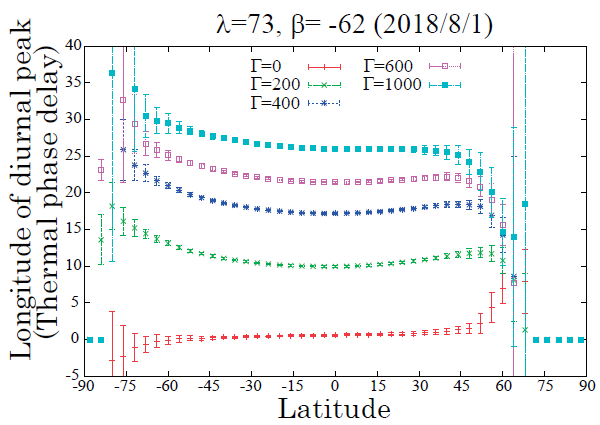
Image Caption :
図 6. さまざまな熱慣性に応じた最高温度到達経度(フィッティングした2次関数の頂点経度)とそのばらつき.
Image : 遊星人
実際の観測では,TIR は一定時間ごとに 1 自転分以上の撮影を行う.こうすると,同緯度線に沿って均質という仮定を置かずとも,特定地域の温度履歴を追跡することができる.ただしこの時には,画像ごとのバイアス誤差が,データのランダム誤差としてふるまうため,熱慣性の決定精度はもう少し悪くなりそうだ.
5. 運用に関連して
TIR による観測は,「はやぶさ2」の運用にとって必要な情報を提供する.特に,タッチダウンを決行する前には候補地点の温度履歴を計測しておき,表面が熱すぎて探査機がダメージを受けるようなことが無いか検討しておく必要がある.ただし,温度が低ければ良いという話ではない.細かい粒子から構成される地面は熱慣性が小さく,逆に岩板から構成される地面は熱慣性が大きい.熱慣性が大きいほうが最高到達温度は低いため,温度条件だけを考えるとタッチダウンに向いている.しかしサンプルを回収しやすいのはもちろん細かい粒子からなる地面であろうし,また細かい粒子が自由に動けるような地域であれば,おのずと地面は平らになっているはずだ.つまり,熱慣性が小さく,高温になるような場所こそサンプリングに向いている,という考え方もできる.これについては現地に到着してから頭を悩ますことになるだろう.
小天体表面に傾いた地形があった場合,太陽からの入射エネルギーは傾きに応じて変化する.例えば北半球で北に傾いている地面は,緯度から期待される温度変化とは異なり,より高緯度の地面と同じような温度履歴をたどることになる.また東に傾いている地面は経度から予想される温度履歴にくらべて,少し前倒しで温度変化する.このように,実際の緯度経度と,温度履歴から求まる相当緯度,相当経度との関係がわかれば,ローカルな地面の傾きを求めることができるだろう.ここで聡明な読者は小首をかしげるかもしれない.天体表面の熱慣性は最高温度に到達する時刻と南中時刻のずれから求めるのだが,そのためには,ローカルな地面の傾きによる相当経度の変化の影響を分離しなければならない.これらは実は,最高到達温度を記録する時刻だけでなく,その前後の温度変化のプロファイル(前述の,2 次関数でフィッティングした際の 2 次の係数)を考慮することで分離が可能である.熱慣性は,表面を構成する粒子サイズに強く依存する.このため,天体衝突によって作られたクレータの周囲にイジェクタが堆積すると,熱慣性の違いとして観測されるはずだ.実際,地上の小さなクレータの場合,温度(履歴)の違いとしてイジェクタブランケットを観測することができる.「はやぶさ2」の場合,衝突装置(SCI)で作った人工クレータをどのように探し出すのかが懸案の一つとなっているが,TIR の観測を通じて,衝突前後の熱慣性の分布の変化を見ることでクレータを見つけられるのではないか,と期待している.TIR が観測するのは熱輻射であるため,太陽位相角が異なる条件の観測を直接比較できる,という強みがある.
6. 現実は複雑
前章,前々章では理想的な系,すなわち 1 ピクセルに相当する空間スケールでは表面は滑らかと考えてよい,という場合について述べた.最後にこの章では,現実はどうなっていそうか,という事について紹介する.
天体表面の 凹凸 は,TIR の観測にとって大きく分けて二つの影響が考えられる.まずひとつめは,放射再吸収の影響である.天体表面に衝突クレータのようなすり鉢状の構造があると,ある面からの熱輻射が,別の面にもう一度吸収される.放射再吸収が生じると,もちろん,表面温度は下がりにくくなる.なお,「はやぶさ2」の目標天体は C 型の小惑星であるので,アルベドは小さい.このため月面のように,太陽光が複雑に散乱された結果,直接陽が当たっていないところを温める,という効果までは考えなくても良いようだ.
もうひとつは,見た目温度の方向依存性である.前章で表面が傾いていると「相当経度」が変化する,という事を紹介したが,実は表面に 凹凸 があるだけでも,見た目の温度履歴が変化する.これを極端かつ単純に示したのが図 7 である.この図を見ると分かるように,地形によっては,太陽側から観測すると高温だが,一定以上の位相角からの観測では見た目の表面温度は非常に低くなる可能性がある.表面 凹凸 による見た目の温度の変化についても現在,様々な条件で数値シミュレーションを進めている.その結果をデータベース化し,現地での撮像の際にはどの条件に一番近いのかを判断できるようにする予定である.
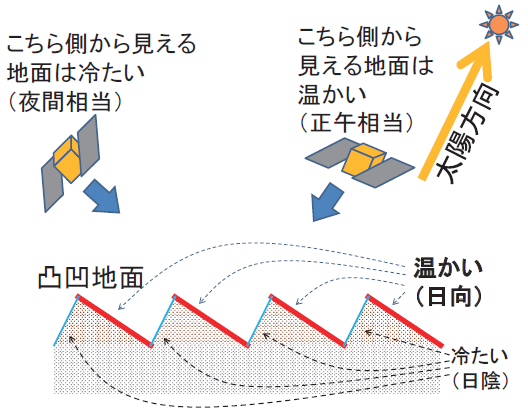
Image Caption :
図 7. 凹凸 のある地面の温度は見る方向によって異なる.
Image : 遊星人
データを解釈するには,可能ならば,実際に天体表面がどのようになっているのかを調べるのが一番手っ取り早い.幸い,「はやぶさ2」にはドイツ航空宇宙センター(DLR)の小型ランダー(MASCOT)が乗っており,そこに搭載された多波長熱放射計(MARA)は,ランダー近傍の地面の温度を計測する.また近赤外分光計(NIRS3)は,解像度は TIR に劣るが 1.8 から 3.2 ミクロンの波長帯のスペクトルが得られるため高温領域ならば直接放射率を求められる可能性がある.TIR は MARA や NIRS3 との同時観測を行うことで,ローカルな温度履歴と,上空から計測した有限の空間スケールでの温度履歴との関係も明らかにする予定である.
参考文献
[1] 福原哲哉 他, 2008, 遊星人 17, 77.
[2] Okada, T. et al., 執筆中 ; Tanaka, S. et al., 執筆中 ; Takita, J. et al., 執筆中.
[3] Delbo, M. et al., 2007, Icarus 190, 236.
[4] 伊藤孝士 他, 2004, 遊星人 13, 212.

Akira IMOTO
Editorial Chief, Executive Director and Board of Director for The Planetary Society of Japan