次世代太陽系探査
はやぶさ2からポストはやぶさ2へ : March 08, 2020. Modified
工学技術としてのはやぶさ2
原文 - 日本惑星科学会誌「遊・星・人」第23巻(2014)3号 - PDF
工学技術としてのはやぶさ2
火の鳥「はやぶさ」未来編 その 06
津田雄一
現)はやぶさ2プロジェクトマネージャー, 宇宙航空研究開発機構宇宙科学研究所・月惑星探査プログラムグループ(当時)
※ この遊星人記事は、日本惑星科学会遊星人編集専門委員会より許可を得て掲載しております。
要旨
はやぶさ2は,小惑星サンプルリターン探査技術を推し進めるミッションであり,初代はやぶさの技術蓄積を橋頭保として,サンプルリターン探査技術を確実なものとし,かつ新たな探査技術を実証するプログラムである.はやぶさ 2 は,基本設計思想は初代はやぶさを踏襲することで,開発期間の短縮とヘリテージに依拠した信頼性確保を目指している.一方で,システム設計には,工学上の挑戦的要素を随所に配して,探査技術の発展とミッション価値の増大に貢献している.小天体探査を工学面で持続的に発展させるには,技術の継承と革新の両面をにらみながら,ミッションを組み立てていくことが重要である.はやぶさ,はやぶさ 2,そしてその次へ.我が国の小天体探査は続く.
1. はやぶさ 2 の工学的位置づけ
「はやぶさ 2」は,小惑星探査機“一号機”である.先代の MUSES - C「はやぶさ」は,今でこそ小惑星探査機と呼ばれることが多いが,正式には工学実験機であり,将来のサンプルリターン探査に必要な鍵となる技術の習得と実証を目的として作られたミッションであった.工学実験機としてのはやぶさは,その役割を十二分に果たしたと言えよう.何よりも四大目標(①電気推進による惑星間航行,②光学自律航法誘導による小惑星接近・着陸,③微小重力下の試料採取技術,④高速再突入カプセルによる試料の直接地上回収)のすべてを実施できたことは極めて重要で,開発・運用の当事者である私たちは,幾多のトラブル克服の経験も含めて,かけがえのない技術蓄積ができたと思っている.
はやぶさ 2 は,この技術蓄積を活かし,小惑星探査を実践する実用機第 1 号のミッションである.実用機の意味するところは大きい.はやぶさが拓いた小惑星探査は,我が国が世界をけん引しうる分野であり,はやぶさ 2 プログラムの実施は,小惑星探査をそのような分野として育てていく,我が国の意思表示でもある.したがって,実用機としてのはやぶさ 2 は,サイエンス価値が一級であることが求められるのはもちろんのこと,工学価値の面でも,初代はやぶさとは異質の意義が求められる.その価値は,次の 2 点に要約されるであろう.
1)はやぶさの技術ヘリテージを活用し,小惑星探査技術の確実性を上げること,(継承)
2)小惑星探査技術の先進性を維持するために,新しい探査技術を開拓すること.(革新)
継承は,小惑星探査を持続的に発展させるために必要な仕掛けであり,革新は世界に伍してこの分野の科学を押し進めるため,そしてこの分野が探査という科学分野に携わる当事者たちにとって魅力的であり続けるために必要な仕掛けである.はやぶさ 2 プロジェクトのミッション定義,サクセスクライテリア設定からは,この工学のココロが反映されているのが読み取れる(表 1)
表 1:はやぶさ 2 のミッション定義と成功基準設定.
| 理学目標 1 | C 型小惑星の物質科学特性を調べる.特に鉱物・水・有機物の相互作用を明らかにする. |
| 【成功基準】 | 【ミニマム】近傍観測による知見、【フル】回収サンプルの分析. |
| 理学目標 2 | 小惑星の再集積過程・内部構造・地下物質の調査により、小惑星の形成過程を調べる. |
| 【成功基準】 | 【ミニマム】近傍観測による知見、【フル】人工クレータ生成による知見 |
| 工学目標 1 | 「はやぶさ」で試みた新しい技術について、ロバスト性、確実性、運用性を向上させ技術として成熟させる. |
| 【成功基準】 | 【ミニマム】小惑星ランデブー、【フル】サンプル採取、ローバー着陸、カプセルリエントリ |
| 工学目標 2 | 衝突体を天体に衝突させる実証を行う. |
| 【成功基準】 | 【ミニマム】人工クレータ生成、【フル】特定領域にクレータ生成、【エクストラ】クレータからのサンプル採取 |
著者のはやぶさ 2 における役割はプロジェクトエンジニアであるが,この仕事には,探査機を技術的に取りまとめるという“ 苦行”と, 工学(Engineering Sciences)としての価値を高めるという“快楽”の両面がある ※ 1.本稿では,そのような一科学者の視点から,はやぶさ 2 の探査技術と,ミッションに上述の工学的なココロを宿らせる小さな努力を紹介したい.
※1. ちなみに,著者は苦行より快楽が好きだが苦行も嫌いではない.
2. 探査機システム設計
2 - 1. 目標天体選定
はやぶさ 2 の探査対象は,有機物や含水鉱物が多く含まれるとされる,C 型スペクトルの小惑星である[1].はやぶさ2 は,探査機質量および電気推進系の能力がはやぶさと同水準であり,この加速能力で到達可能な範囲から,候補天体が選定された(図1).探索の結果,広義の C 型に分類される近地球小惑星で,現有の加速能力で到達可能な小惑星は,1999 JU3,1998 RQ36,2008 EV5 の 3 つであり,日米欧それぞれの探査計画(はやぶさ 2 / OSIRIS-REx / MarcoPolo - R)がこれらを分け合えたのは数奇と言えよう.
Image Caption :
図 1. 探査候補天体の選定.
Image : 遊星人
1999 JU3 は, 着陸可能な程度の大きさ(~ 直径数 100 m 以上)と自転速度(自転周期が速すぎないこと)を有すること等,はやぶさの技術ヘリテージを受け継ぐはやぶさ 2 のハードウェアに起因する各種制約条件を満たす天体として,3 天体の中では最良の選択であった.
2 - 2. 軌道計画
はやぶさ 2 の軌道計画は,(i)EDVEGA フェーズ(Electric Delta-V Earth Gravity Assist,地球→地球),(ii)Transfer フェーズ(地球→ 1999 JU3),(iii)Mission フェーズ(1999 JU3 滞在),(iv)Return フェーズ(1999 JU3 →地球)の 4 フェーズに分割される.このうち,(i),(ii),(iv)がイオンエンジンによる連続推力軌道設計を必要とする部分である.また,(i)と(ii)の接続は,地球スイングバイを経ることで実現する.
軌道設計は,状態量拘束,制御量拘束条件付きの非線形最適化問題として定式化される[2].たとえば,イオンエンジンの能力は制御量不等式拘束で表現され,太陽電池が太陽を向いていなければならない,というような姿勢制約は状態量不等式拘束で表現される.最適化対象はイオンエンジンの燃料消費であり,これを最小化する軌道解を見つけるのが軌道計画である.
とは言え,実際のミッション立案においては,この最適化問題の求解は,軌道計画作業の入り口に過ぎない.純粋に数学的に解いた最適解は,美しすぎて(!)実ミッションの遂行には不向きであり,人為的に解に整形を加えることで,初めて実用に耐える軌道計画となるのである.たとえば,最適解における姿勢履歴は連続関数になるが,それを 7 日単位で不連続関数化することで,現実的な労力で運用ができるよう手を加えたり,完全最適解から故意に非最適方向に解を整形することで,イオンエンジンの不測の停止に対して復旧する時間的余裕を確保したり,ということを行っている.なお,年末年始に極力忙しい運用とならないような配慮もしたかったが,結果として完成した軌道計画は,12 月に地球スイングバイ,12 月に小惑星出発,12 月に地球帰還となってしまった.ここは,私たちごときでは天体力学の神の御業に抗えなかった部分なので,プロジェクトメンバーの皆さん,悪しからず.
図 2 に,軌道設計結果を示す.打ち上げは 2014 年に種子島から,H2A202 - 4S により行われる.2015 年 12 月の地球スイングバイを経て,小惑星到着は 2018 年 6 月,約 1.5 年間小惑星に滞在後,2019 年 12 月に離脱,2020 年 12 月に地球へ帰還する計画である.
Image Caption :
図 2. はやぶさ 2 の軌道計画(太陽=地球ライン固定座標系).
Image : 遊星人
2 - 3. システム設計
はやぶさ 2 の外観を図 3 に,システム構成を表に 2 示す.システム設計の詳説は,他の文献[3][4] に解説を譲る.
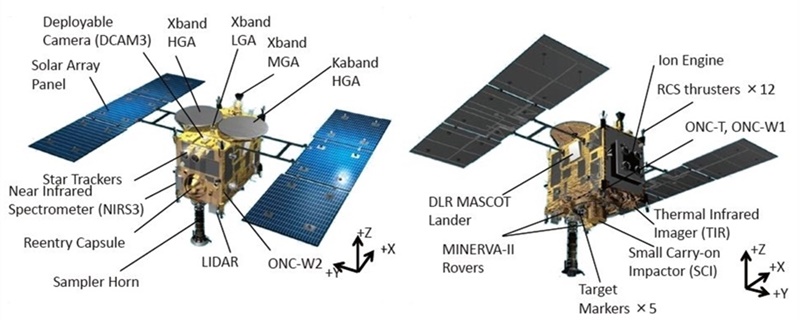
Image Caption :
図 3. はやぶさ 2 の外観図.
Image : 遊星人
表 2:はやぶさ 2 のシステム主要諸元.
| 構造 | -1.6 m x 1.0 m x 1.4 m(H) 箱型構造,固定型太陽電池パドル x 2 翼 -質量 600 kg(wet), 500 kg(dry) |
| データ処理系 | -DHU-PIM バス方式(CPU:COSMO16) -自動化自律化機能 -データレコーダー 1 Gbyte |
| 誘導航法制御系 | -2 重冗長化プロセッサ(CPU:HR5000S) -リアクションホイール(x 4),IRU(x 2), スタートラッカ(x 2), 粗太陽センサ(x 4), 加速度センサ(x 4). -小惑星近接運用航法用センサ LIDAR, LRF, ターゲットマーカー(x 5), フラッシュランプ -航法カメラ(ONC) Wide: ONC-W1, ONC-W2(視野 54 deg x 54 deg, 1 Mpix)Telescopic: ONC-T(視野 5.4 deg × 5.4 deg, 1 Mpix, 5 band filter) |
| 推進系 | 化学推進系 -2 液ヒドラジン方式 - 20 N スラスタ(x 12.) 電気推進系 -マイクロ波放電式イオンエンジン(μ 10) -最大推力 28 mN, 比推力 2800 sec. -スラスタ数 4 (2 軸ジンバル上に配置) -3 基同時駆動(4 / 3 冗長) |
| 通信系 | -X 帯テレコマ系(コヒーレントX up / X down),8 bps-32 Kbps, 完全 2 重冗長構成 Z -Ka 帯高速テレメトリ系(コヒーレントX up / Ka down),8 bps-32 Kbps -折り返し型/再生型測距システム -DDOR 用トーン生成 -アンテナ:X-HGA, Ka-HGA, X-MGA(2 軸ジンバル上に配置), X-LGA(x 3) |
| 電源系 | 太陽電池 -1.4 kW@1.4 AU, 2.6 kW@1 AU. 2 次電池 -リチウムイオン 2 次電池 13.2 AH. 電力系 -シリーズスイッチングレギュレータ方式,50 V バス |
| ミッションペイロード | -サンプラーホーン(SMP) -小型衝突機(SCI) -近赤外線分光計(NIRS3) -中間赤外カメラ(TIR) -ローバー(x 3)(MINERVA-II-A1 / A2 / B) -着陸機(MASCOT,DLR 提供) -分離カメラ(DCAM3) -再突入カプセル(CPSL) |
はやぶさ 2 は,設計思想,システムの基本構成をはやぶさ初号機の設計に依拠することで,短期開発(設計に 2 年,製造・試験に 2.5 年)を実現している.小惑星への接近・近傍運用,タッチダウンなどの,本ミッション特有の運用は,はやぶさ初号機の経験を最大限活かすべく,当初から同一の運用戦略をとる方針で設計された.探査機コンフィグレーションは,この運用戦略と,イオンエンジン等の巡航に必要な装備と姿勢系システム,小惑星の熱環境と熱設計,軌道計画と通信系設計の整合等,非常に多くの設計パラメータから決まる.この設計パラメータ空間の中から,適合解を探索するのが,探査機設計である.例えるなら,多変数の混合整数非線形計画法問題(Mixed Integer Nonlinear Programming)※2 を解くようなものである.救いは,完全最適解を求める必要はなく,適合解でありさえすればよいことであろう.
※2. 変数が連続変数および離散変数で制約条件や目的関数が非線形である最適化問題.離散変数のみで定式化される整数計画法自体がNP困難と呼ばれる問題クラスに属し,厳密解を効率的に求めることは絶望的とされている.連続変数や非線形関数が加わるとなおさら難しい.
この問題を現実的な時間で解くには,解探索の範囲を狭めることが肝要である.はやぶさ 2 の開発にあたっては,初代はやぶさの開発・運用実績を参照することで,とても効率的に解空間を狭めることができている.外見上は,イオンエンジンや太陽電池パドル,サンプラーホーンやカプセルなどの,はやぶさ 2 の特徴が初代はやぶさを色濃く反映していることからもそれがわかる.これはすなわち,探査機の開発上非常に時間と労力を要する,熱設計・構造設計上のリスクを下げていることをも意味する.
これらの活動は,どちらかというと“苦行”に属する.次に,“快楽”の話をしよう.
はやぶさ 2 は,諸般の事情でプロジェクトの立ち上がりが遅れに遅れ,2018 年の会合タイミングで 1999 JU3 に到達できるぎりぎりのタイミングでスタートを切った.しかし,このような短期開発であっても,ミッションの価値を高めるための努力は数多くなされた.工学面でのそのような快楽的活動をいくつか紹介する.
(1)姿勢軌道制御系(AOCS)
従来のタッチダウン運用では,ターゲットマーカーを 1 回の着陸に 1 つ投下して,小惑星相対の画像航法を実現するが,はやぶさ 2 では,それに加えて,直径 2 m の人工クレーターへの着陸を実現するため,ターゲットマーカーを複数使用したピンポイントタッチダウンのしくみを導入した.[5]
また,小惑星近傍での各種観測運用のためにはリアクションホイールによる高精度姿勢制御が欠かせないが,往路 3.5 年の巡航中,そのリアクションホイールを極力温存するために,はやぶさやイカロス[6] で培った,太陽光圧を積極的に利用した姿勢安定化を行う.
タッチダウン運用は,機上の自律化機能・シーケンス管理機能と地上からの支援を組み合わせた方法が採られているが,その運用法には多くの改良が盛り込まれ格段に進化している[7][8].
(2)自動化自律化機能
はやぶさ 2 は,地球から 3.6 億 km 離れた小惑星での近傍運用やタッチダウンを行うが,これは電波で片道 20 分かかる距離であり,探査機が機上で自律的に各種判断を行うことが必須である.はやぶさ 2 を構成するコンポーネントのうち,姿勢系計算機,観測装置群を制御する計算機,バスデータ処理系システムの計算機には,そのための自律判断と状態遷移が可能なシーケンスプログラム機能が備わっており,初代はやぶさからは格段に機能が向上した.一方で,各コンポーネントをインテリジェントにすればするほど,それらコンポーネント間の協調動作の検証が難しくなる.はやぶさ 2 では,探査機の状態遷移を模擬する運用シミュレータを新たに開発して,これに対処しようとしている.
(3)通信系
はやぶさ 2 の外見を特徴づけている 2 つの円盤形状の平板アンテナは,ひとつが金星探査機「あかつき」にも搭載されたラジアル給電スロットアレイ方式の X 帯ハイゲインアンテナ(HGA)であるが,もう一方は 4 倍の周波数の Ka 帯ハイゲインアンテナである[9].これにより小惑星近傍で従来の 4 倍,最大 32 Kbps にダウンリンクビットレートが向上し,はやぶさに比してより多くの観測データを取得することが可能となる.Ka 通信系は,はやぶさ 2 で新規に開発したもので,これにより我が国の深宇宙探査機として,初めて 32 GHz 帯の通信システムを実現し,この分野で欧米に肩を並べることができたことになる.現状,Ka 帯のテレメトリを受信できる地上局は,米国 DSN 局に限られているが,これを機運に,国内でも Ka 帯深宇宙局が実現できることが望まれる.
また,はやぶさ 2 の X 帯通信系には,DDOR(Delta Differential One-way Ranging)機能が我が国として初めて標準装備された[10].DDOR は,地理的に離れた複数の地上局で同時に探査機からの電波を受信することにより,VLBI の原理で探査機方向を精度よく決定する軌道決定手法で,最近の米国の深宇宙探査機では標準的に利用されている.我が国においては,イカロスにおいて DDOR 用 X 帯送信機が実験的に装備されたが,はやぶさ 2 においては主通信機に実装され,本格的な DDOR 運用に供せる状態となった.DDOR 技術により,探査機の軌道決定精度が 10 倍以上向上するほか,小惑星上空滞在中,小惑星の精密な軌道決定にも貢献できる.検出の難しい Yarkovski 効果の観測の糸口になることも期待したい.
(4)イオンエンジン
イオンエンジンは,はやぶさで開発し実証された,マイクロ波放電式イオンエンジン μ10 を継承する[11].イオンエンジンの,低推力だが高比推力(燃費が良い)という特性は,長期間の航行が常の太陽系探査に適した推進方式であり,特にマイクロ波放電式は,原理的に長寿命が狙える点で,太陽系探査に有利と言えよう.我が国の太陽系探査の強みとして育てていきたい技術である.はやぶさ 2 においては,初代 μ10 エンジンの設計を踏襲しつつ,推力を 20 % 向上させた.また,はやぶさ初号機に比べてイオンエンジンシステムとしての自律性が高まり,より運用しやすいエンジンに仕上がっている.これにより,はやぶさ 2 の軌道計画に余裕が生まれ,運用信頼性の向上と,より長い小惑星滞在時間の確保に繋がっている.
(5)衝突装置/分離カメラ
衝突装置(SCI)/分離カメラ(DCAM3)の技術とその新規性は,文献[12] を参照されたい.ここでは,はやぶさ 2 の初期検討段階で検討された,全く異なるミッションコンセプトを紹介しよう.
それは,「独立インパクタ方式」と言う(図 4)[13].はやぶさ 2 本体が 1999 JU3 滞在中に,別の探査機を小惑星に衝突させてクレーター生成し,はやぶさ 2 本体からその様子を観測しようという構想であった.別の探査機と言っても,はやぶさ 2 と同一ロケットに相乗りで打ち上がり,(小惑星ランデブーの必要がないため)イオンエンジンを持たず弾道軌道を飛んで小惑星に衝突する.300 kg 級の探査機を 3 km/s で衝突させるため,現 SCI 方式(2 kg,2 km/s)に比して 2 桁高い衝突エネルギーを実現できる計画であった.米国の Deep Impact が同種の実験を行ったことがことは記憶に新しいが,我々の計画は,(高速で通過しながらではなく)小惑星上空に停留中のはやぶさ 2 から詳細にクレーター生成過程を観測できるのが売りであった.ミッションの成立性を示し提案にまでこぎつけたが,技術的リスクとコストが,現状案(SCI 方式)に比して高く,結果として採用されなかった.
Image Caption :
図 4. 幻の「独立インパクタ」ミッションコンセプト.
Image : 遊星人
現在の SCI は,それ自身挑戦的であり工学的理学的価値の高いミッションに仕上がっている.その裏には,上述に代表される消えた対案がたくさんあり,トレードオフにより選りすぐられた技術が,はやぶさ 2 への搭載の切符を手にしているのである.
(6)その他にもまだまだあります
上記は,主として工学的価値の観点に立って努力が払われた搭載系技術の典型例として紹介した.ここでは紹介しきれないが,他のサブシステム(サンプラー然り,カプセル然り,航法カメラ然り,その他諸々諸々)にも,宇宙探査を前進させる,いぶし銀に光る技術が散りばめられている.
一般に探査機の設計は,挑戦的要素と継承すべき要素,信頼性確保とコスト制約の心地よいバランスで決めていく.宇宙探査プロジェクトは,それに携わる人間にとって,長い時間と多大な労力を強いられる活動である.異例の短期開発とされるはやぶさ 2 でも,プロジェクト発足から打ち上げまで 4.5 年,地球帰還まで含めると 10 年超である.このような複雑かつ長期に渡るプロジェクトをまとめるには,プロジェクトに関わる個々人にとって,ミッションと技術が魅力的であることが不可欠である.プロジェクトメンバーの士気も,探査機設計という混合整数非線形計画法の重要な制約条件の一つなのである.
3. アストロダイナミクスとはやぶさ 2
著者は研究者としてはアストロダイナミクスに傾倒しており,はやぶさ 2 はその観点でもとても魅力的なミッションである.はやぶさ 2 のサイエンスチームには,アストロダイナミクスの分科会を作っており,また工学研究に主眼を置いたアストロダイナミクス研究会も設置している[14].
アストロダイナミクスは,守備範囲が広く定義が難しい分野なのだが,著者のイメージは,「天体力学を人工物に応用するための学問」である.
はやぶさ 2 において扱うアストロダイナミクスの問題を列挙してみる.①低推力連続推力を利用した軌道計画,②小惑星近傍での誘導航法制御,③小惑星ランデブー時の電波・光学接近航法誘導,④小惑星の地図作り(グローバルマッピング),⑤電波・光学情報を駆使した重力場推定,⑥小惑星の軌道推定,⑦ YORP / Yarkovski 効果,⑧クレーター生成時のイジェクタの挙動等々.
一言で表すならば,はやぶさ 2 のアストロダイナミクスの観点での魅力は,強摂動下での姿勢・軌道運動の探求と実践であろう.古典的なケプラー運動(二体問題)の摂動論を超えた天体力学の複雑さ(=強摂動)を積極的に利用し運用に役立てること.小惑星の微小重力も,太陽光圧も強摂動,イオンエンジンの推力も,人工的な摂動として扱える.
アストロダイナミクスは歴史ある学問分野であり,世界中の数多くの研究者により支えられている.その一角を,アストロダイナミクスの実践の場として,小惑星探査機はやぶさ 2 がけん引し貢献できたら,これに勝る幸せ(快楽)はない.
4. 小惑星探査の将来とはやぶさ 2 の使命
はやぶさが実証して見せた,小惑星サンプルリターン探査は,世界の追随が激しい.米国の OSIRIS-REx ははやぶさ 2 と同時期に小惑星に到着するし,欧州も MarcoPolo-R を企画中である.
思い返せば,我が国の深宇宙探査ミッションは,ハレー彗星探査機「さきがけ」「すいせい」に始まっており,「はやぶさ」「はやぶさ 2」(図 5)も含めると,小天体探査に強みを打ち出せる土壌がある.小天体探査におけるこの実践力は,日本の科学に対する国際的評価,国際的なプレゼンスを高めるものであるし,その効果を私たちは過小評価してはいけない.

Image Caption :
図 5. 2014 年後半の打ち上げをめざしシステム試験中のはやぶさ 2 フライトモデル(© JAXA).
Image : 遊星人
こういうと,厳格な工学者からは怒られるかもしれないが,技術の本質は紙の上に残るものではない.はやぶさの開発経験者,運用経験者こそが,はやぶさ 2 が依拠する最大のヘリテージであり,そのような人的ヘリテージを橋頭保として,技術は進化していく.はやぶさ打ち上げからはやぶさ 2 打ち上げまで 11 年.開発の当事者としては,技術「者」の経験と spirit の継承という意味で,この時間はぎりぎりであったと感じている.
予算規模に勝る欧米が本気を出せば,私たちの優位性はひとたまりもない.私たちの進むべきは,機動性高く,高頻度で,小さくてもリスクを取り,アイディアの詰まったミッションを創出し続けることである.
小惑星サンプルリターンという探査法を世界で初めて実践するというリスクを私たちは取った.その実証結果は,世界中でその次の計画創出に繋がった.はやぶさ 2 で,新たな小天体探査のステージに私たちは進む.はやぶさ 2 を,その次の小天体探査の橋頭保にしたい.
参考文献
[1] Yoshikawa, M., Hayabusa-2 Project Team, 2011, 28th International Symposium on Space Technology and Science, 2011-k-19.
[2] 津田雄一ほか, 2011, 第55回宇宙科学技術連合講演会, 1D03.
[3] Tsuda, Y. et al., 2013, Acta Astronautica 2013, 90, 356.
[4] 津田雄一, はやぶさ2プロジェクトチーム, 2012, 第56回宇宙科学技術連合講演会, 3A02.
[5] 尾川順子ほか, 2012, 第56回宇宙科学技術連合講演会, 3A11.
[6] Tsuda, Y. et al., 2013, AIAA Journal of Guidance, Navigation and Control 36, 4, 967.
[7] Mimasu, Y. et al., 2013, 19th IFAC Symposium on Automatic Control in Aerospace, FrAT1.3.
[8] Terui F. et al., 2013, 36th Annual AAS Guidance & Control Conference, AAS13-094.
[9] 戸田知朗, 津田雄一, 川原康介, 2012, 第56回宇宙科学技術連合講演会, 3A06.
[10] 竹内央ほか, 2012, 第56回宇宙科学技術連合講演会, 3A07.
[11] 細田聡史ほか, 2012, 第56回宇宙科学技術連合講演会, 3A09.
[12] 荒川政彦, 和田浩二, はやぶさ2SCI/DCAM3チーム, 2013, 遊星人 22, 3, 152.
[13] Tsuda, Y., Saiki, T., Terui, F., 2013, 29th International Symposium on Space Technology and Science, 2013-d-19.
[14] 池田人ほか, 2013, 第13回宇宙科学シンポジウム, P2-123.

Akira IMOTO
Editorial Chief, Executive Director and Board of Director for The Planetary Society of Japan